Tesla Autopilot vs. Systeme anderer Hersteller
Sehr interessant: "The best or nothing" gegen den "Prügelknaben"
Beste Antwort im Thema
Zitat:
@radio schrieb am 27. Februar 2020 um 06:51:50 Uhr:
............sei es durch Kinder, Ehefrau, mittleren Alterns oder mal wieder zu wenig geschlafen.
Dann solltest du dir eine Alternative zum fahren suchen.
Besonders wenn du zu wenig Schlaf hast. 🙂
4228 Antworten
Die Ausreisser der KIs sind nicht mal ansatzwese qualitativ einzuschätzen, und auch nicht wann sie auftreten- und das ist ein ganz grundsätzliches Problem. Und keines von Rechenleistung - denn die Rev Eng. 'Tests die man aktuell gegen AIs und NNs fährt sind ja keine Echtzeitsysteme.
https://arxiv.org/pdf/1710.08864.pdf
Mustererkennung von AI ist eben nicht mit menschlicher vergleichbar auch wenn das in sehr guten NN Netzen in fast allen Fällen übereinstimmt.
Und das ist durchaus ein grosses Problem wenn man sich nicht auf Messdaten zusätzlich verlässt sondern nur auf Interpretation.
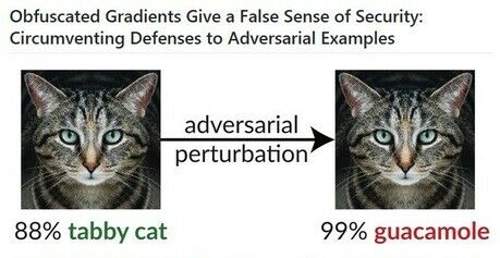
Minimalste für den Menschen nicht mal wahrnehmbare Änderungen von 0,0001% des Bildes können selbst bei insgesamt sehr guten AIs zu völlig absurden (zumindest für den Menschen absurden) Falscherkennungen führen.
z.B. auch hier mal ein Katzenbild 😁
Zitat:
@DanielWb schrieb am 6. Mai 2018 um 21:24:26 Uhr:
Die Ausreisser der KIs sind nicht mal ansatzwese qualitativ einzuschätzen, und auch nicht wann sie auftreten- und das ist ein ganz grundsätzliches Problem.
Da ist was dran, aber schon etwas veralteter Wissensstand.
Es gibt auch schon die ersten Erkenntnisse in der Forschung was ein NN sieht und auf welchen Kriterien die Entscheidungen basieren. NN sind keine Blackboxes mehr und das Problem ist auch kein grundsätzliches mehr.
Ein sehr guter Artikel dazu ist z.B.:
https://distill.pub/2018/building-blocks/
Also muss man damit rechnen, dass ich einigen Jahren Gehirnstrukturen von zu früh verstorbenen Menschen im Armaturenbrett eingebaut werden, damit man Situationen, welche noch nie eingetroffen sind, einigermassen richtig abhandeln zu können. Man kann, wenn dann doch ein Unfall passiert, dem Verstorbenen die Schuld geben, nicht dem Autohersteller. Mir würde es eigentlich reichen, wenn ich in der Stadt keinen Parkplatz finde, das Auto mit 20 km/h alleine weiterfährt um einen freien Parkplatz zu finden... und später ich das Auto wieder zu mir zurückrufen kann. Das wäre für mich schon ein wenig Level 5....
Ich meine der AP1 hat vor ein paar Jahren jedes andere System um Welten* geschlagen, was Testfahrten in Norwegen zeigten. Da war Tesla schon mal richtig weit vor. Natürlich nicht zu vergleichen mit einem sicheren Verhalten im Innerortsbereich, davon ist man schon noch ziemlich weit entfernt - um es unwissenschaftlich zu beschreiben.
* bitte nicht allzu wörtlich nehmen
Zitat:
@MartinBru schrieb am 6. Mai 2018 um 19:54:10 Uhr:
Das Gehirn ist eine reine Mustererkennungsmaschine. Wenn man nun eine Software schreibt, die Muster erkennt, dann ist das künstliche Intelligenz. Wenn diese kurze Implikationskette zu komplex ist, bleib lieber beim Bier. 😁
Das gute für Dich ist: Eine Implikation mit falscher Antezedens ist immer wahr. Das schlechte ist: Sie ist definitiv falsch. Ist mir jetzt aber auch egal, aber ich hoffe für Dich, dass Dein Gehirn nicht nur Muster erkennt.
Zurück zum Thema:
Ich habe momentan einen S75D "Ersatzstaubi" mit AP 1. Installiert ist 2018.12 und IMHO fährt der noch immer so gut wie der AP 2 (ich habe nach 300km keine Szenarien gehabt, in denen irgendwas subjektiv schlechter gewesen wäre). Zudem ist der Fernlichtassistent wirklich brauchbar und der AP 1 erkennt die Verkehrszeichen. Das Abbremsen bei Geschwindigkeitsbegrenzungen ist für mein Empfinden erheblich sanfter und der Spurwechselassist reagiert ist weniger paranoid. Im Stau folgt er zudem dem Vordermann und bildet dadurch eine Gasse (Vorderfahrzeug wird blau dargestellt) und fährt nicht wie mein AP 2 in der Mitte.
Kurzum: Würden die beiden Systeme per Stand heute nicht weiterentwickelt werden, würde ich den AP 1 empfehlen.
Edit: Eine Sache habe ich noch vergessen. Bei AP1 geht der Spurwechselassistent auch auf Nationalstrassen. Beim AP2 nur auf Autobahnen. Der AP1 unterscheidet zudem in Motorrad, PKW und LKW und bildet auch (ohne Spurwechsel) die Verkehrsteilnehmer auf anderen Spuren ein. Beim AP2 sind alles PKW und eingeblendet wird eine andere Spur nur beim Spurwechsel.
Ähnliche Themen
Der AP2 unterscheidet wohl auch schon zwischen den Arten der Verkehrsteilnehmer, zeigt es nur noch nicht an, ebenso wie Nebenspuren. Auch soll mittlerweile die Performance bei engeren Kurven (Abfahrten z.B.) besser sein als beim AP1.
Also auf Abfahrten habe ich den Autopiloten ausgeschaltet, deshalb kann ich dazu nichts sagen. Ich verwende ihn nur auf Nationalstrassen und Autobahnen. Und da macht der AP1 eine sehr gute Figur. Die Kurvenradien sind natürlich eher lässig.
Wie ist es denn beim AP2 und Fahrrädern bei Dir auf einspurigen Landstrassen? Bei ACC bremst er da bei mir schon recht häufig ab, wenn ein Fahrradfahrer in meine Richtung fährt - der AP1 macht das besser. Deshalb habe ich daraus geschlossen, dass der AP2 das wohl nicht erkennt und meint, dass ein Auto vor mir fährt (so zeigt er es ja auch an). Auch entgegenkommender Verkehr wird vom AP1 IMHO besser als solcher erkannt und er verzögert nicht unnötig.
Wie Jan oben geschrieben hat, hat der AP1 immer noch gewisse Vorteile im Vergleich zum AP2 auf der AB, d.h. dort wo momentan Assistenzsysteme eingesetzt werden sollten. Ausserhalb der AB, auf Landstrassen und vor allem in der Stadt/Dorf, hat der AP2 mittlerweile deutliche Vorteile gegenüber dem AP1. Nicht nur in engen Kurven, die der AP1 nicht bewältigen kann, sonder auch bei der Interpretation von Fahrbahnmarkierungen. AP2 folgt auch abrupt ändernden Fahrbahnmarkierungen sehr zuverlässig, da wo der AP1 einfach gerade aus, ungewollt auf die Abbiegespur fährt. Natürlich hinkt dieser Vergleich, da weder AP1 noch der aktuelle Stand beim AP2 für diese Situationen ausgelegt sind. Es zeigt aber schon in welche Richtung es beim AP2 geht.
Auf dem Weg zur Arbeit habe ich nur 10% AB. AP1 schalte ich auf der Gesamtarbeitsstrecke zu 30% ein, AP2 fast zu 90% (dabei 2 mal im Kreisverkehr und einmal Richtungswechsel aus).
Offensichtlich reicht auch die Prozessorleistung des AP 2.5 nicht für Level 4/5 aus.
https://electrek.co/2018/05/07/tesla-autopilot-computer-retrofits/
Ja, weil die alle nicht ordentlich performant programmieren können. Damals am C64 in Assembler mit so Tricks wie Rasterzeileninterrupt wäre das mit 1MHz und 64kB RAM kein Problem gewesen. 😉
Die Kiste Bier verliere ich aber erst, wenn sich Elon Musk hinstellt und verkündet, dass sie Lidar nachrüsten müssen.
Zitat:
@MartinBru schrieb am 7. Mai 2018 um 14:40:50 Uhr:
Die Kiste Bier verliere ich aber erst, wenn sich Elon Musk hinstellt und verkündet, dass sie Lidar nachrüsten müssen.
Die Wette würde ich auch mitgehen. 🙂 Wobei ich der Meinung bin, dass es ohne C2C und C2I auch nicht gehen wird. Da muss Tesla aber nicht zwangsläufig was nachrüsten.
Zitat:
Da ist was dran, aber schon etwas veralteter Wissensstand.
Es gibt auch schon die ersten Erkenntnisse in der Forschung was ein NN sieht und auf welchen Kriterien die Entscheidungen basieren. NN sind keine Blackboxes mehr und das Problem ist auch kein grundsätzliches mehr.
Ein sehr guter Artikel dazu ist z.B.:
https://distill.pub/2018/building-blocks/
In dem Artikel steht doch überhaupt nichts zu dem prinzipiellen Problem das hinter den adversarial examples seht - das ist lediglich ein allgemeiner Einsteiger-Artikel zur Basisfunktion von AI und Mustererkennungen.
Natürlich kann man für einen konkreten Fall die AI Arbeitsweise nachvollziehen mit entsprechendem zeitlichen Aufwand - Basis der adversarial examples ist auch RE - aber das hat doch nichts mit dem Problem zu tun, das ist die Erkenntnis dass man eine 100% Pfadüberdeckung bräuchte um eine Mindestqualität für jeden Fall zu haben und Grenzwerttests da nicht ausreichen.
NN und AI haben nämlich - wie man durch die adversarial examples sieht, das Problem dass eine Grenzwertbetrachtung nicht möglich ist - man also nicht sagen kann wenn x und y funktionieren dann funktioniert auch alles dazwischen z mit z > x und z < y.
Die adversarial examples die dieses Problem der Nicht-Grenwertproblematik aufzeigen sind aktuellster Stand der Forschung - das ist Wissensstand 2018.
Um das mal etwas zu veranschaulichen was das Problem ist - wenn eine AI ein Katzenbild mit 0 Fehlpixel erkennt und das gleiche Bild mit 100 Fehlpixeln genauso - dass die AI bei dem gleichen Bild mit 3 Fehlpixel nicht plötzlich absolut überzeugt ist das ist ganz eindeutig ein Blumentopf.
Natürlich kann man das nachvollziehen wie die falsche Entscheidung durch die AI in dem Einzelfall zustande kam - aber eben hinterher per RE und nur für den Einzelfall - weíl man keine 100% Pfadabdeckung vorher machen kann.
Nun mit Lidar zusätzlich kann man eine autonome Parkplastzsuche zumindest einfach sehr sicher machen.
Da ist nämlich die letzte Zeile so liebe optische KI - egal was du glaubst erkannt zu haben oder auch nicht - ich messe ein Objekt dieser Grösse in der gewählten Fahrstrecke, das existiert auf jeden Fall -> Stopp oder ausweichen. 😁
Und damit kann man ausreichend sicher garantieren, dass das Auto keine Menschen überfährt unabhängig davon, was die optisch basierte AI glaubt richtig zu erkennen.
Zitat:
@derJan82 schrieb am 7. Mai 2018 um 13:25:47 Uhr:
Also auf Abfahrten habe ich den Autopiloten ausgeschaltet, deshalb kann ich dazu nichts sagen. Ich verwende ihn nur auf Nationalstrassen und Autobahnen. Und da macht der AP1 eine sehr gute Figur. Die Kurvenradien sind natürlich eher lässig.
Das ist natürlich völlig richtig - sollte man immer dazusagen. AP1 und 2 sind aktuell nur für den beschriebenen Einsatzzweck "gemacht". Alles was man "experimentell" darüber hinaus macht muss unter hoher Vorsicht und Aufmerksamkeit passieren.
Zitat:
Wie ist es denn beim AP2 und Fahrrädern bei Dir auf einspurigen Landstrassen? Bei ACC bremst er da bei mir schon recht häufig ab, wenn ein Fahrradfahrer in meine Richtung fährt - der AP1 macht das besser. Deshalb habe ich daraus geschlossen, dass der AP2 das wohl nicht erkennt und meint, dass ein Auto vor mir fährt (so zeigt er es ja auch an). Auch entgegenkommender Verkehr wird vom AP1 IMHO besser als solcher erkannt und er verzögert nicht unnötig.
Ich vermute mal du meintest "beim AP1 und Fahrrädern", nicht AP2? Wir haben im Auto ja nur AP1.
Ehrlich gesagt hatte ich den Fall noch nicht mit Fahrrad + eingeschaltetem AP, ich deaktiviere dann alles und fahre selbst vorbei. Kurzes Abbremsen bei entgegenkommendem Verkehr habe ich vielleicht ein...zwei Mal gehabt, der AP2 ist da wohl "unsicherer", weil er auf mehr Daten zurückgreifen kann.
Die Erfassung von Motorrädern beim AP1 funktioniert jedenfalls aus meiner bisherigen Erfahrung gut, inkl. Anzeige als Motorrad. Mich würde mal interessieren was passiert wenn zwei Motorräder nebeneinander vor einem fahren. Ob dann ein Auto angezeigt wird oder zwei Motorräder. 😉
Zitat:
@ballex schrieb am 7. Mai 2018 um 20:28:10 Uhr:
Ich vermute mal du meintest "beim AP1 und Fahrrädern", nicht AP2? Wir haben im Auto ja nur AP1.
Nein. Dachte du hast AP2 - sorry.
Ich fahre bestimmt 50% mit ACC. Benutze ihn aber eher als reinen Tempomaten, weil ich früher leider oft zu schnell war. Unterdessen mache ich ihn beim Tesla auch oft aus. Beim Audi fahre ich hingegen fast nur mit ACC.
Ich kam heute in der Mittagspause zu einer tollen Gelegenheit zum Test des Autopiloten: Gesperrter Militärflughafen 😉
Nachdem ich getestet habe wie Staubi so auf Richtungswechsel bei Geschwindigkeiten reagiert, die ich auf einer Strasse nicht ausprobieren wollte, folgte mein Autopilot Test.
Vorweg muss ich leider sagen, dass ich gerne mit einer höheren Geschwindigkeit getestet hätte, aber der Autopilot hat bei mir immer auf 80 km/h begrenzt - keine Ahnung wieso. Kann man das ausschalten?
Die ersten Tests erfolgten auf dem Taxiway, da er hier beide Strassenmarkierung erkannte und der AP von einer normalen Strasse ausging.
Test 1: Bremsen bei stehendem Fahrzeug bei Autopilot
Ein Soldat war so frei mir das Follow-Me (ein VW Multivan in matt olivgrün) mitten auf den Taxiway zu stellen und vorsichtshalber auszusteigen. Ich kam mit 80 km/h mit Autopilot angefahren. Der Autopilot bremste recht unspektakuär ab und hielt hinter dem Fahrzeug. Den Test habe ich am Ende des Taxiways mit einer deutlichen Kurve erneut wiederholt. Kein Problem: Er hält an.
Test 2: Notbremsassistent bei stehendem Fahrzeug ohne Autopilot
Wurde parallel zu Test 1 durchgeführt. Der Multivan stand exakt an der gleichen Stelle. Bei gerade Strasse kam der Warnton - zum bremsen hätte es aber nicht gereicht. Ich habe übernommen und bin rechts vorbeigezogen. Die Flächen sind zum Glück asphalitiert. Nun das Erstaunliche: In der leichten Kurve kam der Warnton samt Bremse eher. Warnblinker war an. Ich musste trotzdem vorbeiziehen - ganz gereicht hat es wohl nicht. Fazit: In meinem Szenario funktioniert das in der Kurve besser als auf der Geraden. Erkannt wurde das Fahrzeug in beiden Fällen. Zur Kollision wäre es aber wohl gekommen - auf der Geraden ganz sicher.
Test 3: Analog zu Test 1 mit Militärfahrrad
Wird genauso erkannt.
Test 4: Analog zu Test 2 mit Fahrrad
Verhält sich fast identisch zu Test 2, wenn das Fahrrad in Fahrtrichtung ist. Ist das Fahrrad quer zur Fahrtrichtung (90°) wird das Fahrrad nicht erkannt. Es gab keinen Alarm oder etwas anderes.
Test 5: Durchfahrt Autopilot durch scharfe Kurven
Bei scharfen Kurven verlässt er die Fahrbahn um wenige Zentimeter, kommt aber zurück. Er schaltet nicht einfach ab (zumindest bei dem was ich so testen konnte). Die Geschwindigkeit konnte ich leider nicht höher als 80 km/h wählen. Gebremst wurde jeweils erheblich zu spät - so wäre ich nicht gefahren.
Die nun folgenden Tests fanden auf der Landebahn statt - und zwar in der Mitte. Der Autobahn erkannte somit eine Strasse mit nur einer Strassenmarkierung (das Ding war einfach zu breit).
Test 6: Wegfall der Markierung
Der Autopilot fuhr in der Mitte der Landebahn (Anmerkung der Redaktion: Lässiges Gefühl) und orientierte sich an dem Streifen in der Landebahnmitte. Am Ende der Landebahn in Richtung Westen ist ein leeres Vorfeld. Als Staubi dem Bereich ohne Markierung erreichte hielt er Tapfer die Spur und wollte nach wenigen Sekunden, dass ich übernehme (weiss blinkender Displayrahmen), aber es kam kein energischer Warnton oder ähnliches. Ich hatte hier nicht genug Platz den AP abstellen zu lassen und musste vor der Wiese bremsen. Wenn der AP also keine Linien erkennt, scheint er zunächst einfach weiter zu fahren.
Test 7: Nicht interpretierbare Markierungen
Gleicher Test wie 6, aber in die andere Richtung. hier sind auf dem Vorfeld noch jede Menge Markierungen - u.a. glaube ich für Hubschrauber (keine Ahnung), die unseren Weg kreuzten. Verhalten zunächst analog zu Test 6. Als ich dann auf eine neue Markierung traf kam ein energischer Warnton und unten die Meldung: "Lenkung sofort übernehmen! Position unklar!" und der Autopilot rekuperierte stark bis 12 km/h. Er bremste hier meiner Meinung nach nicht. Nach wenigen Sekunden mit 12 km/h folgte dann die starke Bremsung - wahrscheinlich, weil ich eben nicht übernommen habe.
Kommenden Mittwoch bin ich wahrscheinlich wieder da. Wenn ich also noch etwas testen soll 😉