Komfortbatterie, aber warum ist das des Öfteren eine Fehlerquelle?
Thema: Komfortbatterie.
Warum?
Das können wir hier in diesem Thread klären.
Ich fange damit mal an.
Die Entwickler des Wagens spendierten ihm ein Zweibatteriensystem. Demnach soll u.a. auch sichergestellt werden, dass WÄHREND des Startvorgang ALLE Steuergeräte mit konstant 12 Volt versorgt sind und es zu keinen Aussetzern kommen kann; denke ich, wird so sein.
Es gibt mehrere Bus - Systeme im Phaeton, habe ich gestern gelesen,.die schon mal streiken, z.B. wenn eine Standheizung versagt, bzw..die Platine verreckt ist.
Was genau passiert in diesen Bussystemen, wenn die Komfortbatterie schwächelt?
Fehlen Signale? Wo werden fehlende Informationen festgehalten?
In der VW Bedienungsanleitung steht geschrieben, dass eine Komfortbatterie / Bordnetzspannung zwischen 9.7 und 13 Volt haben darf. Diesen Wert können die meisten Komfortbatterien bieten, trotzdem reagiert das System sehr empfindlich auf zu wenig Spannung, z.B. "nur" 11 Volt.
Mehrere Kleinigkeiten sind in meinem Wagen aufgetreten, oftmals unerklärliche Sachen, die allesamt durch Austausch der Komfortbatterie behoben wurden, und zwar dauerhaft seit mehr als einem halben Jahr, so lange liegt der Austausch zurück.
Mich interessiert jetzt, warum das so ist, was genau ist der Grund?
Edit:
Habe gelesen dass der Generator die Komfortbatterie auf direktem Weg auflädt.
Edit end.
Seit dem Tausch steht die Voltanzeige meistens bei 13 Volt (Zündung angeschaltet, Motor aus), heute sogar etwas darüber, ca 13.5 Volt.
Wenn Motor läuft sind es immer 14 Volt.
Wenn Motor aus, bleibt sie bei 13 - 13,5 Volt stehen, selbst dann wenn ich 3 Stunden auf dem Feld stehe um Musik zu hören.
Die alte Komfortbatterie sank bis unter 11 Volt. Verbraucher sind damals auch immer regelmäßig abgeschaltet worden, was jetzt nicht mehr der Fall ist. Am meisten hat mich damals der Kofferraum gestört, der sein Eigenleben vollzogen hat.
Auch damals:
Der Wagen startet, Motor läuft, Generator liefert genug? Versorgungsspannung, und trotzdem meckert die Elektrik mit Kleinigkeiten.
Vielleicht gibts hier einen Elektriker, dem das 5km Kabelnetz des Phaeton einigermaßen bekannt ist.
Der VW Bedienungsanleitung darf man folglich keinen 100 Prozentigen Glauben schenken.
Ist die Batterie nicht 100 Prozent in Ordnung, spinnt das System.
Beste Antwort im Thema
Zurück zum Thema des TE und den wilden Vermutungen zu Beginn.
vielfach diskutiert und oft nachvollzogen: Wenn unerklärliche Effekte auftreten wird ein Batteriewechsel angeraten der dann die Probleme beseitigt. Aber warum reagiert der Phaeton so empfindlich? Hier der Versuch das zu klären.
@A346 Und lieber Udo.... wenn dir die "wissenschaftliche Abhandlung" zu kompliziert wird, "klare Kante" - einfach nicht mehr weiterlesen. 🙂
Die Batterie
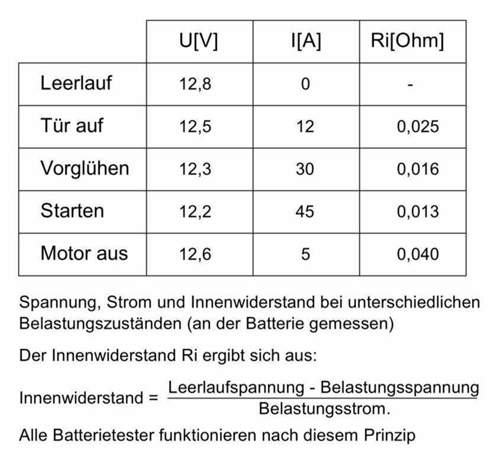
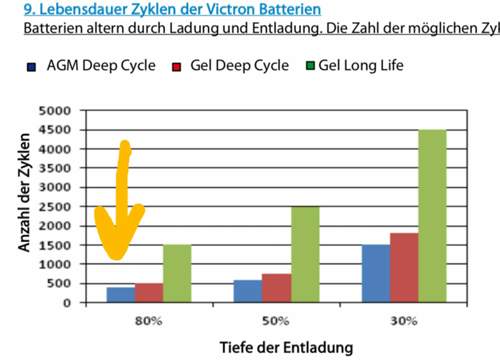
Kein einziger Kennwert einer Bleibatterie ist stabil und eindeutig bestimmbar. Sie hängen alle von der Vorgeschichte und vor allem von der Temperatur ab. Zwei Werte sind wichtig:die Ladeschlußspannung und die Spannungsuntergrenze, beide sind Herstellerabhängig (je nach verwendeter Bleilegierung). Wird die Ladeschlußspannung überschrittendann fängt die Batterie an zu Gasen, das verändert die Säuredichte. Bei Unterspannung (Tiefentladung <11,8V) treten Schichtbildungen an den Elektrodenplatten auf, starker Kapazitätsverlust ist unter Anderem die Folge. Beides reduziert die Anzahl der Lade-Entladezyklen die mit 500-1500 sowieso nicht übermäßig üppig ausfallen.
Die Probleme ergeben sich beim Start, da treten gewaltige Ströme auf welche die Spannung einbrechen lassen. Im ersten Bild hab ich dazu einige gemessene Werte notiert. Die Stromwerte sind nur grob bestimmt weil ein Zangenmessgerät zu langsam ist um auf Stromspitzen zu reagieren. Wie man sieht ist sogar der Innenwiderstand stark Stromabhängig, wenn er mal über 0,1 Ohm liegt sollte man an eine neue Batterie denken.
In den 1970ern war es normal, das im Schnitt alle 3 Jahre eine neue Batterie fällig wurde. Die Qualität ist also enorm gestiegen. Meine Starterbatterie hat 14 Jahre ihren Dienst getan! Trotzdem ist die Batterie das schwächste Glied im Gesamtsystem.
Die Elektronik
Aber warum stört eigentlich ein Spannungseinbruch so sehr? Niemand entwickelt eine Schaltung die bei nur einer Spannung arbeitet, man definiert immer einen Arbeitsbereich.
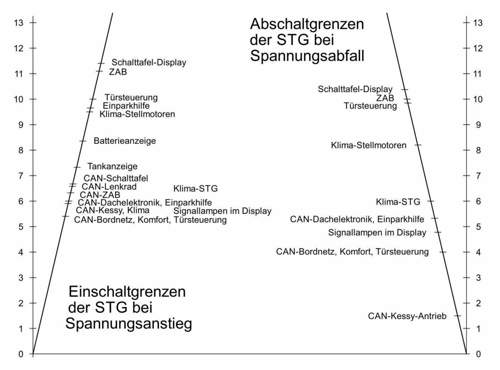
Deshalb einige Messungen in welchen Bereichen die Steuergeräte funktionieren. Ich habe die Versorgungsspannung von 0V langsam bis 13V hoch und wieder runtergefahren. Die dabei festgestellten Ein- und Ausschaltschwellen für einige Steuergeräte sind im Bild notiert.
Die wichtigsten Ergebnisse: ab 7V sind alle CAN-Busse aller Steuergeräte aktiv. Beim Runterfahren ist die Sicherheit noch größer, Kessy-Antrieb arbeitet sogar runter bis 1,5V. Die höchsten Schwellen treten auf wenn Motoren (Tür-STG) oder Displays (ZAB, Schalttafel) im Spiel sind. Diese Schwellen sind gut reproduzierbar und folglich per Software definiert. Bei 11,5V hab ich einen Wert gefunden welcher offenbar als Untergrenze festgelegt wurde.
Fazit
Niemand möchte ständig Strom und Spannung kontrollieren. Eine einfache Möglichkeit hat sich jedoch herauskristallisiert: als gute Entscheidungshilfe kann das Display in der Schalttafel dienen.
Vorglühen und nicht starten sondern das Vorglühen einfach wieder beenden. Wenn dann das Display aus- und nicht wieder angeht liegt die Spannung zwischen 10,5V und 11,5V (Tiefentladen!)
Spätestens dann ist der Batteriewechsel fällig.
LG Günther
167 Antworten
Lies Dir einfach die passende SSP durch. Jeder Verbraucher hat eine Priorität, der (unwichtige) Verbraucher wird abgeschaltet, damit die anderen (wichtigeren) Komponenten mit ausreichend Spannung versorgt werden können.
Danke.
SSP.
Werde ich mir durchlesen.
Edit: SSP soeben gelesen.
Komfortbatterie wird direkt aufgeladen und Startbatterie mittels einem Parallelschaltrelay versorgt.
Hm....demzufolge reicht die Ladespannung des Generator bei niederen Drehzahlen für eine schwache Komfortbatterie nicht aus, oder eine schwache Komfortbatterie nimmt dem Generator den Saft weg, sodass nicht genug fürs Bordnetz übrig bleibt?
Das erklärt, warum damals das Innenraumlicht überm Rückspiegel im Leerlauf hell und weniger hell wurde.
Wer hat das auch an seinem Wagen bemerkt?
Wäre hier nicht vorteilhafter, eine KLEINERE Bordnetzbatterie zu betreiben, die deutlich schneller wieder aufgeladen wird?
Ne 95AH liefert sicherlich die 12 Volt über einen längeren Zeitraum als eine 70AH, aber logischerweise müsste die 70AH deutlich schneller geladen werden, um schlussendlich wieder vollem Saft zu liefern?
VW setzt voll und ganz auf den CAN - Bus (CAN OPEN) Controller Area Network.
Der CAN-BUS ist serielles Bussystem und gehört zu den Feldbussen.
Er wurde 1983 vom Unternehmen Bosch entwickelt und 1986 zusammen mit Intel vorgestellt. Sein Zweck ist es, Kabelbäume zu reduzieren und hiermit Kosten und Gewicht zu sparen. Zur damaligen Zeit konnte die Gesamtlänge aller Kabel im Kraftfahrzeug ohne CAN bis zu 2 km betragen.
CAN ist als ISO 11898 international standardisiert und definiert die Layer 1 (physische Schicht) und 2 (Datensicherungsschicht) im ISO/OSI-Referenzmodell. Die beiden gängigsten Realisierungen der physischen Schichten sind nach ISO 11898-2 (Highspeed-CAN) und ISO 11898-3 (Lowspeed-CAN). Sie unterscheiden sich in zahlreichen Eigenschaften und sind nicht zueinander kompatibel.
Der CAN-Bus arbeitet nach dem „Multi-Master-Prinzip“ d. h., er verbindet mehrere gleichberechtigte Steuergeräte. Ein CSMA/CR-Verfahren löst Kollisionen (gleichzeitiger Buszugriff) auf, ohne dass die gewinnende, höher priorisierte Nachricht beschädigt wird. Dazu sind die Bits – je nach Zustand – dominant bzw. rezessiv (ein dominantes Bit überschreibt ein rezessives). Die logische 1 ist rezessiv, kann sich auf dem Bus also nur durchsetzen, solange kein Teilnehmer logisch 0 sendet, logisch entspricht dies einer UND-Verknüpfung, obwohl bei Betrachtung einer der Leitungen für die Spannungspegel eine Wired-OR-Verknüpfung gilt. Die Daten sind NRZ-codiert, mit Bitstopfen zur fortlaufenden Synchronisierung auch von Busteilnehmern mit wenig stabilem Oszillator. Zur Datensicherung kommt zyklische Redundanzprüfung zum Einsatz. Der Bus ist entweder mit Kupferleitungen oder über Glasfaser ausgeführt.
Spannungspegel im Highspeed-CAN-Bus
Im Falle von Kupferleitungen arbeitet der CAN-Bus mit zwei verdrillten Adern, CAN_HIGH und CAN_LOW (symmetrische Signalübertragung). CAN_GND (Masse) als dritte Ader ist optional, jedoch oft zusammen mit einer vierten Ader zur 5-V-Stromversorgung vorhanden.
Bei höheren Datenraten (Highspeed-CAN) ist der Spannungshub zwischen den beiden Zuständen relativ gering: Im rezessiven Ruhezustand ist die Differenzspannung null (beide Adern etwa 2,5 V über Masse), im dominanten Zustand beträgt sie mindestens 2 V (CAN_HIGH > 3,5 V, CAN_LOW < 1,5 V).
Beim für größere Distanzen geeigneten Lowspeed-CAN kommt ein Spannungshub von 7 V zum Einsatz, indem die rezessiven Ruhepegel auf 5 V (CAN_LOW) und 0 V (CAN_HIGH) gelegt sind. Bei Ausfall einer der beiden Leitungen kann die Spannung der anderen Leitung gegen Masse ausgewertet werden. Bei langsameren Bussen („Komfort-Bus“ z. B. zur Betätigung von Elementen durch den Benutzer) kann ein Eindrahtsystem mit der Karosserie als Masse deshalb reichen. Praktisch wird es meistens doch als Zweidrahtsystem ausgeführt, verwendet aber im Fall eines Aderbruchs den Eindrahtbetrieb als Rückfallebene, um den Betrieb weiterführen zu können. Das nennt sich dann „Limp-Home-Modus“ (Deutsch: „nach-Hause-humpeln-Modus“).
Topologie
Linearer CAN-Bus
Das CAN-Netzwerk wird als Linienstruktur aufgebaut. Stichleitungen sind in eingeschränktem Umfang zulässig. Auch ein sternförmiger Bus (z. B. bei der Zentralverriegelung im Auto) ist möglich. Diese Varianten haben allerdings im Vergleich zum linienförmigen Bus Nachteile:
Der sternförmige Bus wird meist von einem Zentralrechner gesteuert, da diesen alle Informationen passieren müssen, mit der Folge, dass bei einem Ausfall des Zentralrechners keine Informationen weitergeleitet werden können. Beim Ausfall eines einzelnen Steuergeräts funktioniert der Bus weiter.
Für Stichleitungen und sternförmige Busarchitektur ist der Leitungswellenwiderstand etwas aufwendiger zu bestimmen. Die Anzahl der Stichleitungen und ihre Gesamtlänge wird durch empirische Richtformeln abgeschätzt. Der lineare Bus hat den Vorteil, dass alle Steuergeräte parallel an einer zentralen Leitung liegen. Nur wenn diese ausfällt, funktioniert der Bus nicht mehr. Diese Topologie wird häufig in Kraftfahrzeugen eingesetzt.
An jedem Leitungsende sollte sich ein Abschlusswiderstand von 120 Ohm befinden. Für einen einzelnen CAN-Bus-Teilnehmer an einer Stichleitung wirkt dies genauso wie ein einzelner 60-Ohm-Widerstand, der am Ort der Abzweigung eingefügt ist. Dieser Wert ist die zentrale Impedanz einer Sternarchitektur.
Synchronisierung und Zeitquanten
Die nominale Datenübertragungsrate im Netzwerk muss allen Teilnehmern bekannt sein, ggf. durch automatische Detektion – CAN in Automation hat dazu eine Application-Note herausgegeben, CiA 801. Die Synchronisation auf den genauen Beginn einer Nachricht erfolgt mit dem Wechsel vom rezessiven Idle-Pegel des Busses zum dominanten Synchronisations-Bit, mit dem jede Nachricht beginnt. Jeder weitere Pegelwechsel von rezessiv zu dominant kann zur dynamischen Nachsynchronisierung der Empfänger verwendet werden. Die Nachsynchronisierung gleicht Phasenrauschen und -drift zwischen den lokalen Oszillatoren aus. Eine Nachsynchronisierung findet auch während der Arbitrierungsphase statt, wenn ein Sender eine Nachricht mit höherer Priorität zu senden beginnt. Dies bewirkt meist ebenfalls einen Phasensprung in Bezug zur vorherigen Nachricht.
Maximale Übertragungsrate und Leitungslänge
Es wird zwischen einem Highspeed-Bus mit einer Datenrate von bis zu 1 Mbit/s und einem Lowspeed-Bus mit bis zu 125 kbit/s unterschieden. Diese Raten gelten jedoch nur bei Leitungslängen bis zu 40 m. Darüber hängt die maximal zulässige Datenrate von der Leitungslänge ab. Mit niedrigeren Datenraten sind längere Leitungen möglich: Bei 500 kbit/s bis zu 100 m und bei 125 kbit/s bis zu 500 m.
Diese Maximalwerte beruhen darauf, dass die Zeit, die ein Signal am Bus anliegt (Bitzeit, Sekunde/Bit), umso kürzer ist, je höher die Übertragungsrate ist. Mit zunehmender Leitungslänge steigt jedoch die Zeit, die ein Signal braucht, bis es am anderen Ende des Busses angekommen ist (Ausbreitungsgeschwindigkeit). Zu beachten ist, dass sich das Signal nicht nur ausbreitet, sondern auch der Empfänger auch innerhalb einer begrenzten Zeit auf den Sender reagieren muss (siehe ACK). Der Sender muss wiederum die eventuelle Buspegeländerung des oder der Empfänger mitbekommen (siehe auch Arbitrierung). Deshalb ist die maximale Leitungslänge etwas komplexer zu berechnen. Es müssen Verzögerungszeiten auf der Leitung, des Transceivers (Sender und Empfänger), des Controllers (Sender und Empfänger), Oszillatortoleranzen und der gesetzte Abtastzeitpunkt (Sender und Empfänger) berücksichtigt werden.
Der weiter entwickelte CAN FD Standard erlaubt es die Datenrate nach der Verbindungsaushandlung zu erhöhen. Damit kann die Übertragungsgeschwindigkeit des Datenabschnitts um den Faktor 10 oder mehr gesteigert werden.
Als Busmedium werden nach ISO 11898-2 (High-Speed Medium Access Unit) Twisted-Pair-Kabel ursprünglich mit einem Wellenwiderstand von 108–132 Ohm empfohlen. In der derzeit gültigen Ausgabe der ISO 11898-2 aus dem Jahr 2003 ist die Toleranz mit 95–140 Ohm spezifiziert (Abschnitt 7.5.1, Tabelle 9).
Die maximale Teilnehmeranzahl auf physischer Ebene hängt von den verwendeten Bustreiberbausteinen (Transceiver, physische Anschaltung an den Bus) ab. Mit gängigen Bausteinen sind 32, 64 oder bis zu 110 (mit Einschränkungen bis zu 128) Teilnehmer pro Leitung möglich (Erweiterungsmöglichkeit über Repeater oder Bridge).
Objekt-Identifier
Der Objekt-Identifier kennzeichnet den Inhalt der Nachricht, nicht das Gerät. Zum Beispiel kann in einem Messsystem den Parametern Temperatur, Spannung und Druck jeweils ein eigener Identifier zugewiesen sein. Es können mehrere Parameter unter einem Identifier vereint sein solange die Summe der Daten die maximal mögliche Länge des Datenfeldes nicht überschreitet. Die Empfänger entscheiden anhand des Identifiers, ob die Nachricht für sie relevant ist oder nicht.
Zudem dient der Objekt-Identifier auch der Priorisierung der Nachrichten.
Die Spezifikation definiert zwei Identifier-Formate:
11-Bit-Identifier, auch „Base frame format“ genannt (CAN 2.0A)
29-Bit-Identifier, auch „Extended frame format“ genannt (CAN 2.0B).
Ein Teilnehmer kann Empfänger und Sender von Nachrichten mit beliebig vielen Identifiern sein, aber umgekehrt darf es zu einem Identifier immer nur maximal einen Sender geben, damit die Arbitrierung funktioniert.
Der 29-Bit-Identifier ist in erster Linie für das Umfeld von Nutzfahrzeugen, Schiffen, Schienenfahrzeugen und Landmaschinen definiert. Der CAN-Standard fordert, dass eine Implementierung das „Base frame format“ akzeptieren muss, dagegen das „Extended frame format“ akzeptieren kann, es aber zumindest tolerieren muss.
Die Liste der Objekt-Identifier einschließlich Sender und Empfänger ist Bestandteil der sog. Kommunikationsmatrix oder K-Matrix.
Arbitrierung, Priorität
Der Buszugriff wird verlustfrei mittels der bitweisen Arbitrierung auf Basis der Identifier der zu sendenden Nachrichten aufgelöst. Dazu überwacht jeder Sender den Bus, während er gerade den Identifier sendet. Senden zwei Teilnehmer gleichzeitig, so überschreibt das erste dominante Bit eines der beiden das entsprechend rezessive des anderen, was dieser erkennt und seinen Übertragungsversuch beendet. Verwenden beide Teilnehmer den gleichen Identifier, wird nicht sofort ein Error-Frame erzeugt (siehe Frame-Aufbau), sondern erst bei einer Kollision innerhalb der restlichen Bits, was durch die Arbitrierung ausgeschlossen sein sollte. Daher empfiehlt der Standard, dass ein Identifier auch nur von maximal einem Teilnehmer verwendet werden soll.
Durch dieses Verfahren ist auch eine Hierarchie der Nachrichten untereinander gegeben. Die Nachricht mit dem niedrigsten Identifier darf immer übertragen werden. Für die Übertragung von zeitkritischen Nachrichten kann also ein Identifier hoher Priorität (= niedrige ID, z. B. 0x001; 0x000 für Netzmanagement – NMT) vergeben werden, um ihnen so Vorrang bei der Übertragung zu gewähren. Dennoch kann selbst bei hochprioren Botschaften der Sendezeitpunkt zeitlich nicht genau vorher bestimmt werden, da gerade in Übertragung befindliche Nachrichten nicht unterbrochen werden können und den Startzeitpunkt einer Sendung so bis zur maximalen Nachrichtenlänge verzögern können (nichtdeterministisches Verhalten). Lediglich die maximale Sendeverzögerung für die höchstpriore Nachricht kann bei bekannter maximaler Nachrichtenlänge errechnet werden. Für niederpriore Nachrichten ist im Allgemeinen keine Aussage über den Sendezeitpunkt möglich.
Sollte ein Teilnehmer kontinuierlich Nachrichten mit einer hohen Priorität versenden, kann dies zur Blockade des Busses führen, da die Nachrichten der anderen Teilnehmer jeweils die Arbitrierung verlieren. Dieses Verhalten wird als Babbling idiot beschrieben. Sollte dieses Verhalten auf einer Fehlfunktion basieren, kann es nur durch zusätzliche Hardware – sogenannte Buswächter (Bus Guardians) – gelöst werden.[1]
Frame-Aufbau
CAN-Daten-Frame mit elektrischen Pegeln ohne Stuffbits
CAN-Datentelegramm im Base Frame Format
CAN-Datentelegramm im Extended-Frame-Format
Die Kommunikation erfolgt mit Telegrammen. Innerhalb eines Telegramms gibt es Steuerbits und Nutzbits (roter Bereich). Der genormte Aufbau eines solchen Telegrammrahmens wird als Frame bezeichnet.
Es gibt vier verschiedene Arten von Frames:
Daten-Frame, dient dem Transport von Daten
Remote-Frame, dient der Anforderung eines Daten-Frames von einem anderen Teilnehmer
Error-Frame, signalisiert allen Teilnehmern eine erkannte Fehlerbedingung in der Übertragung
Overload-Frame, dient als Zwangspause zwischen Daten- und Remote-Frames
Daten-Frame
Ein Daten-Frame ist logisch wie folgt aufgebaut:
Start of Frame (SOF) = ein dominantes Bit
Arbitrierungsfeld, bestehend aus einem Identifier-Segment (11 Bit oder 29+2 Bit) plus einem RTR-Bit (Remote Transmission Request, siehe unten)
Kontrollfeld (CTRL) = 6 Bit
Identifier Extension (IDE) = 1 Bit
reserved = 1 Bit
Data Length Code (DLC) = 4 Bit (Anzahl der Bytes im Datenfeld, 0 bis 8 Bytes, Werte 9 bis 15 werden nicht unterstützt)
Datenfeld (DATA) = 0 bis 8 mal 8 Bit
Prüfsummenfeld (CRC) = 15 Bit (Generatorpolynom x 15 + x 14 + x 10 + x 8 + x 7 + x 4 + x 3 + 1 {\displaystyle x^{15}+x^{14}+x^{10}+x^{8}+x^{7}+x^{4}+x^{3}+1} {\displaystyle x^{15}+x^{14}+x^{10}+x^{8}+x^{7}+x^{4}+x^{3}+1}) gefolgt von einem rezessiven CRC-Delimiter-Bit
Bestätigungsfeld (ACK) = 2 Bit, bestehend aus einem ACK-Slot (siehe untenstehende Erläuterung) plus einem rezessiven ACK-Delimiter
End of Frame (EOF) = 7 Bit (rezessiv)
Intermission (IFS – Intermission Frame Space) = 3 Bit (= min. Anzahl der Bits, die aufeinanderfolgende Botschaften trennt)
Remote-Frame
Ein gesetztes RTR-Bit (Remote Transmission Request) kennzeichnet einen Remote-Frame (rezessiv). Mit Hilfe eines Remote-Frames kann ein Teilnehmer einen anderen auffordern, seine Daten zu senden.
Im Falle eines „Extended Identifiers“ (siehe oben) wird das RTR-Bit durch das SRR-Bit (Substitute Remote Request) ersetzt und ebenfalls rezessiv gesendet. In diesem Fall wird das nachfolgende IDE-Bit ebenfalls rezessiv gesendet, wodurch ein „Extended Identifier“ signalisiert wird. Im Anschluss werden die restlichen 18 Bit des Identifiers und anschließend das eigentliche RTR-Bit gesendet. Das IDE-Bit zählt dabei logisch zum „Arbitrierungsfeld“, wobei das Kontrollfeld aber weiterhin aus 6 Bit besteht.
Die Datenlänge muss entsprechend der zu erwartenden Datenlänge gesetzt werden (Fehlerquelle: Viele Entwickler setzen die Datenlänge = 0 – dies ist falsch; ebenso sind CAN-Controller am Markt, welche RTR-Frames nur mit der Datenlänge 0 senden können). Der Objektidentifier ist derselbe wie der der angeforderten Nachricht.
Error-Frame
Der Error-Frame besteht aus zwei Feldern:
Das erste Feld wird bestimmt durch die Überlagerung von ERROR FLAGS, die von den verschiedenen Stationen erzeugt werden können.
Das folgende Feld ist der ERROR DELIMITER (8 rezessive Bits) .
Es gibt zwei Typen von Error Flags:
Active Error Flag
6 dominante Bits, gesendet von einem Knoten, der einen Fehler im Netzwerk entdeckt hat und im Fehler-Status „error active“ ist.
Passive Error Flag
6 rezessive Bits, gesendet von einem Knoten, der einen Fehler im Netzwerk entdeckt hat und im Fehler-Status „error passive“ ist.
Overload-Frame
Der Overload-Frame ist eine Zwangspause zwischen Daten- und Remote-Frames.
Er beinhaltet zwei Felder: Overload Flag und Overload Delimiter.
Es gibt zwei Arten von Überlastung, die zur Generierung des Overload-Flag führen:
Die Elektronik des Empfängers erfordert eine Verzögerung der Übertragung des nächsten Datenframes oder Remoteframes (bspw. aufgrund eines vollen Empfangspuffers).
Erkennung eines dominanten Bits auf dem Bus während einer Übertragungspause des eigenen Sendevorganges.
Ein Overload-Frame, verursacht aufgrund des ersten Falls, darf nur im ersten Bitintervall einer erwarteten Sendepause erzeugt werden, während ein Overload-Frame, bedingt durch Fall 2, einen Takt nach der Erkennung des dominanten Bits gesendet wird.
Das Overload-Flag besteht aus sechs dominanten Bits.
Die allgemeine Form korrespondiert zu der des Active-Error-Flags: Die Form des Overload-Flags zerstört die festgelegte Übertragungsform, da das Bitstuffing verletzt wird. Als Konsequenz erkennen alle anderen Geräte ebenfalls die Überlastung und generieren selber wiederum auch ein Overload-Flag.
Der Overload-Delimiter besteht aus acht rezessiven Bits und entspricht der Form des Error-Delimiters.
ACK-Slot
Der Acknowledge-Slot wird verwendet, um den Empfang eines korrekten CAN-Frames zu quittieren. Jeder Empfänger, der keinen Fehler feststellen konnte, setzt einen dominanten Pegel an der Stelle des ACK-Slots und überschreibt somit den rezessiven Pegel des Senders. Im Falle einer negativen Quittung (rezessiver Pegel) muss der fehlererkennende Knoten nach dem ACK-Delimiter ein Error-Flag auflegen, damit erstens der Sender vom Übertragungsfehler in Kenntnis gesetzt wird und zweitens, um netzweite Datenkonsistenz sicherzustellen. Wird der rezessive Pegel von einem Empfänger durch einen dominanten überschrieben, kann der Absender jedoch nicht davon ausgehen, dass das Telegramm von allen anderen Empfängern erhalten wurde.
Bit Stuffing
CAN-Frame mit Pegeln mit Stuffbits.svg
Bitfolgen mit mehr als fünf gleichen Bits werden im CAN-Protokoll für Steuerungszwecke z. B. „End of Frame“ benutzt. Es dürfen also innerhalb des CAN-Frames nicht mehr als fünf Bits mit dem gleichen Pegel hintereinander vorkommen. Um dies zu verhindern, wird nach fünf Bits mit dem gleichen Pegel ein Bit mit dem inversen Pegel eingefügt. Dieses Bit nennt man „Stopf-Bit“ oder „stuff bit“. Das Bild zeigt den gleichen CAN-Frame vor und nach dem Einfügen von Stopf-Bits. Die Stopfbits sind lila eingefärbt. Bitstopfen (bit stuffing) kann die physische Länge eines Frames vergrößern. Bit stuffing wirkt auf Start of frame (SOF) bis einschließlich Prüfsummenfeld (CRC) von Daten- sowie Remote-Frames und dient der Nachsynchronisation der Teilnehmer innerhalb eines Frames.
Datensicherung
Erkennt ein Empfänger eine Fehlerbedingung, sendet er einen Error-Frame und veranlasst so alle Teilnehmer, den Frame zu verwerfen. Sollten andere Teilnehmer diese Fehlerbedingung erkannt haben, senden sie ihrerseits direkt im Anschluss ein weiteres Error-Frame. Damit wird eine weitere Sicherheitsfunktion des CAN-Protokolls möglich. Um zu vermeiden, dass einzelne Teilnehmer durch irrtümlich erkannte Fehlerbedingungen dauerhaft den Nachrichtentransport blockieren, enthält jeder Teilnehmer Fehlerzähler. Diese Zähler erlauben nach den Regeln der Spezifikation, einen fehlerhaft arbeitenden Teilnehmer in zwei Stufen des Betriebszustands vom Bus zu trennen, wenn er wiederholt Fehler erkennt, die andere Teilnehmer nicht erkennen, oder wiederholt fehlerhafte Frames versendet. Die Zustände nennen sich error active (normal), error passive (Teilnehmer darf nur noch passive – das heißt rezessive – Error-Frames senden) und bus off (Teilnehmer darf nicht mehr senden).
Der Sender wiederholt nach dem Error-Frame seine Datenübertragung. Auch der Sender kann durch die zuvor erwähnten Fehlerzähler vom Bus getrennt werden, wenn die Datenübertragung dauerhaft fehlschlägt. Verschiedene Fehlerfälle führen zu einer unterschiedlich großen Erhöhung des Fehlerzählers.
Klasse. Genau DAS habe ich gesucht.
Ich lese mir das jetzt mal durch.
Bis später 🙂
Edit.
Überflogen.
Der Dicke hat, wenn ich Deinem Text es richtig entnommen habe, ein 3 - Bus - System. Antrieb, Komfort und Info.
Ob darin auch ein optischer Gang verbaut ist, dazu müsste ich das nochmals richtig lesen, keine Ahnung.
Aaaaaber meine Antwort auf meine Frage habe ich gefunden!!!
1.
Ein solch aufwendig konstruiertes 3 - Bussystem benötigt demzufolge IMMER eine ausreichende 12 Volt Spannung aus einer ZYKLENFESTEN Batterie und kann im dieser Konstellation NICHT vernünftig funktionieren, wenn es abweichende Spannungen innerhalb des Bordnetzes gibt.
2.
Habe ich gelesen dass Prioritäten festgelegt sind, und das System scheinbar Probleme hat, wenn zu oft "die selben Informationen" durch den Benutzer gesendet werden.
Das heißt für mich im Klartext:
Im Phaeton muss alles stets mit intuitiver Sorgfalt und gesundem Bediener - Sachverstand bedient werden, ansonsten kann das Bussystem streiken, oder es kommt zwangsläufig zu Problemen mit den Verbrauchern.
Wenn sodann eine schwächelnde Spannungsquelle als Stromerzeuger dient, ist das mehr oder weniger die Erklärung einer Reihe von unerklärlichen Problemchen.
Danke🙂
Ähnliche Themen
Daraus lässt sich dann doch prinzipiell ableiten, dass wenn ein STG den CAN LOW oder HIGH über die Karosserie-Masse abgleicht, und die Massepunkte an jener Stelle marode sind, es zu einem Wirrwarr im Bus kommen kann, oder?
Genau.
Leider ist das so, deshalb mit etwas Mehrarbeit verbunden.
Daher ist mein Dicker mein besonderer "Patient".
Es bedarf einer erweiterten Spezialpflege damit genau DAS alles funktionieren kann.
Besser ist das, einen solchen Wagen grundsätzlich in einer trockenen Garage zu parken.
Zitate @Uw.Pampus:
1) "Das heißt für mich im Klartext:
Im Phaeton muss alles stets mit intuitiver Sorgfalt und gesundem Bediener - Sachverstand bedient werden, ansonsten kann das Bussystem streiken, oder es kommt zwangsläufig zu Problemen mit den Verbrauchern."
2) "Besser ist das, einen solchen Wagen grundsätzlich in einer trockenen Garage zu parken."
zu 1) Ich fahre seit 9 1/2 Jahren Phaeton wie jedes anderes Auto vorher. Dazu benötige keine intuitive Sorgfalt.
Probleme mit den Verbrauchern sind mir unbekannt, trotz alter Batterien seit der EZ 01/2009.
zu 2) Mein Phaeton parkt bei Wind und Wetter draußen. Es schadet ihm in keiner Weise.
LG
Udo
Also Jungs ihr schießt weit über das Ziel hinaus !
Seitenweise Bücher abschreiben bringt für das Verständnis auch nicht viel. Dafür gibt es fertiges, siehe Anhang. Niemand der mit dem CAN-Bus arbeitet muß sich mit der Bit-Ebene beschäftigen. Das gibt es alles fertig in Hardware gegossen.
Wegen Massepunkte kann es keinesfalls zu "Wirrwarr im Bus" kommen! Die Pegelunabhängigkeit war ja eines der Entwicklungsziele und wurde mit dem Zweidraht-System zur Differenzbildung erreicht. Der CAN-Bus ist so robust daß er auch in Industrieanlagen verwendet wird.
In jedem STG werkelt ein Microprozessor der unter Anderem auch die Versorgungsspannung mißt. Alle Bausteine die den CAN-Bus betreffen (edit) arbeiten mit 5V. In jedem Steuergerät sind mehrere Spannungsregler welche die 12V auf 5V abregeln. Das ganze System funktioniert runter bis zu 6V. Die Abhängigkeit von der Batteriespannung ist gewollt und per Software vorgegeben. Weil die Bleibatterie-Systeme so schlecht sind muß man auf Nummer sicher gehen und untere Funktionsgrenzen definieren.
Noch einmal: gemessen an den anderen Systemen im Auto, ist die Bleibatterie das Schlechteste! Einmal Tiefentladen kostet 20-30% Kapazität, extrem Temperaturabhängig, die entnehmbare Leistung ist extrem Abhängig vom Ladezustand und vom Strom selbst, die Stromaufnahme hängt nicht vom Angebot ab (Lichtmaschine) sondern vom Ladezustand usw. Es ist ein chemisches System mit jeder Menge Dreckeffekte die auch die beste Elektronik nur zum Teil kompensieren kann.
Zugegeben, im Lauf der Jahre sind auch die Bleibatterien immer besser geworden. Die grundsätzlichen Schwächen bleiben aber weil Systemimmanent.
Mit freundlichen Grüßen
Günther
Edit: @Udo meiner parkt inzwischen auch draußen. Die Garage war nur wichtig solange meine Standheizung extrem Feuchtigkeitsempfindlich war. 😁
@Phaetomenia,
eine Verlinkung auf die Quelle deiner Ausführungen hätte vollkommen ausgereicht, anstatt daraus einen ellenlangen Beitrag zu produzieren und hier die Seiten damit aufzublähen.
Einfach so:
https://de.wikipedia.org/wiki/Controller_Area_Network
Udo
Ich sehe das wie Günther.
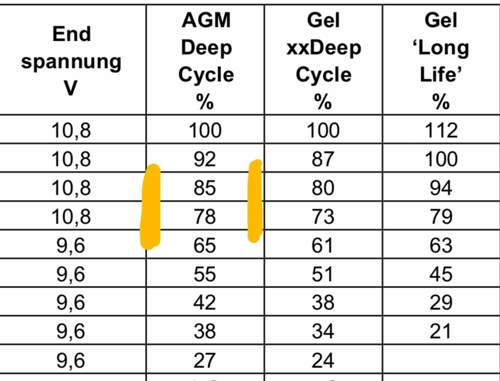
Eigentlich ist es doch ganz einfach: die Komfbat ist völlig ausreichend dimensioniert, ebenso wie die LIMA, es sei denn, ein Minimum der anwesenden STG und sonstiger Verbraucher, die ja weiß Gott zur Genüge vorhanden sind, tut nicht richtig und die AGM wird auf ca. 10,5-11V entladen. Siehe Anhang. Dann ist es recht schnell vorbei mit dem gesunden Batterieleben und ominöse Reaktionen des P bringen immer wieder vor: LIMA viel zu klein, Fehlkonstruktion, passierte beim 5‘er nicht...usw...
Geschätzte Freunde,
es gibt bestimmt interessante Fussnoten und das für manche Vieles am Phaeton eine "Fehlkonstruktion" ist, habe ich auch schon zur Kenntnis genommen.
Ob mich da jetzt eine akademische Abhandlung und ellenlange Auszüge aus einer Diplomarbeit eines Besseren belehren, wohl kaum.
In jedem modernen Fahrzeug ist die Spannungsversorgung die fragilste Stelle, mittlerweile durch hervorragende Batterietechnologien (bis hin zu Lithium-Ionen) etwas "entschärft".
Es bleibt dabei, egal in welche Richtungen der BUS "fährt" und welches Steuergerät auf einen Befehl reagiert, wenn möglich, die Batterien mit einem sehr guten Lade- bzw. Erhaltungsgerät "striegeln", auf jeden Fall eben die Dinger auch mal erneuern.
Dabei nun nicht gerade die Batterie beim Kaffeeröster kaufen...
Am Wochenende habe ich mir die 4 Teile zur GMD bei Youtube mal wieder reingezogen, einfach nur irre...
Auch in die Werbung wurde mit viel Hingabe 'investiert', dieses Verschmelzen dieser einzigartigen Barockstadt mit diesem phantastischen Fahrzeug...
Musik und Bilder in vollendeter Symbiose...
Genuss beim Hören, Sehen und Fahren...
Deswegen fahren wir kein Fahrzeug vom anderen Stern, nein, nein - Unzulänglichkeiten gibt es genug, aber auch S-Klasse und 7er BMW haben genug davon.
Aber: Es sind und bleiben die besten Autos der Welt, die in Deutschland gebaut werden und in dieser besonderen Klasse hatte VW bis 2016 mitgemischt.
Schön, dass es einen Ferdinand Piëch gab, der die Kraft und den Einfluß hatte, so etwas Spektakuläres aus der Taufe zu heben...
Viele Grüsse
Jens
Und ganz ehrlich, wenn der Phaeton sooooo fragil wäre, würde ich jetzt keinen 17 Jahre alten V8 GP0 mit so vielen Vorbesitzern wie er Zylinder hat fahren. Der muss halt etwas geliebt werden, aber auch nicht viel mehr als ein Golf.
Es gibt Leute, die fahren nur, um von A nach B zu kommen. Die schmeißen das Ding für die Inspektion zur nächstbesten Werkstattkette und das war's. Auf die individuellen Bedürfnisse wie z.b Abläufe reinigen wird da oft nicht geachtet, also.. Alles abhängig vom Besitzer, bei jedem Auto 🙂
Zitat:
@gusto-v10 schrieb am 20. Juli 2020 um 08:36:41 Uhr:
Also Jungs ihr schießt weit über das Ziel hinaus !Seitenweise Bücher abschreiben bringt für das Verständnis auch nicht viel. Dafür gibt es fertiges, siehe Anhang. Niemand der mit dem CAN-Bus arbeitet muß sich mit der Bit-Ebene beschäftigen. Das gibt es alles fertig in Hardware gegossen.
Wegen Massepunkte kann es keinesfalls zu "Wirrwarr im Bus" kommen! Die Pegelunabhängigkeit war ja eines der Entwicklungsziele und wurde mit dem Zweidraht-System zur Differenzbildung erreicht. Der CAN-Bus ist so robust daß er auch in Industrieanlagen verwendet wird.
In jedem STG werkelt ein Microprozessor der unter Anderem auch die Versorgungsspannung mißt. Alle Bausteine die den CAN-Bus betreffen (edit) arbeiten mit 5V. In jedem Steuergerät sind mehrere Spannungsregler welche die 12V auf 5V abregeln. Das ganze System funktioniert runter bis zu 6V. Die Abhängigkeit von der Batteriespannung ist gewollt und per Software vorgegeben. Weil die Bleibatterie-Systeme so schlecht sind muß man auf Nummer sicher gehen und untere Funktionsgrenzen definieren.
Noch einmal: gemessen an den anderen Systemen im Auto, ist die Bleibatterie das Schlechteste! Einmal Tiefentladen kostet 20-30% Kapazität, extrem Temperaturabhängig, die entnehmbare Leistung ist extrem Abhängig vom Ladezustand und vom Strom selbst, die Stromaufnahme hängt nicht vom Angebot ab (Lichtmaschine) sondern vom Ladezustand usw. Es ist ein chemisches System mit jeder Menge Dreckeffekte die auch die beste Elektronik nur zum Teil kompensieren kann.
Zugegeben, im Lauf der Jahre sind auch die Bleibatterien immer besser geworden. Die grundsätzlichen Schwächen bleiben aber weil Systemimmanent.
Mit freundlichen Grüßen
GüntherEdit: @Udo meiner parkt inzwischen auch draußen. Die Garage war nur wichtig solange meine Standheizung extrem Feuchtigkeitsempfindlich war. 😁
Hallo Günther.
Danke für Dein Statement.
Du hast das Problem mit Deiner Standheizung in den Griff bekommen.
Hast Du zuvor Probleme mit Deinem Wagen feststellen können, die sich im Laufe der Zeit verschlimmert haben, weil die Platine abgetaucht ist, BEVOR Du erfahren hast, was los war?
Lieber Udo,
Kannst Du diesen tagelangen Beitrag von Phaetonmania, weiter oben, vielleicht etwas abspecken (lassen)?
Uwe: das Voltmeter im Phaeton zeigt keine genaue Spannung an; es ist sozusagen etwas „geschönt“ damit Phaetischista keine unnötigen Notrufe absetzen. Ich kann Dir nur empfehlen ein Dingens, wie auf dem Bild zu benutzen: Du steigst ein, Zündung an (ohne Motorstart) jetzt mal ablesen: alles unter 10,5V deutet auf eine tote Komfbat. bzw. zu hohen Stromverbrauch (Kurzstrecken mit intensiver Dynaudio und Standheizungs-Einsatz mal außen vor). Ladeschlußspannung bei intakter Batterie zwischen 14,4 und 14,6V. Mir hat das viel Aufregung erspart; sobald die Anzeige in diese Richtung geht: neue Batterie....
