Spezialisten gefragt zum Thema CAN Bus Comand-Umbau 2.5 auf 2.0
So, nachdem mein 2.5-er immer und dauerhaft Datum und Uhrzeit verloren hat, habe ich den Umbau auf 2.0 gewagt. Elektrisch und mechanisch ist es fertig und sieht gut aus. D2B Bus läuft ohne Probleme, somit auch Telefon, CD-Wechsler und BOSE.
Was noch nicht funktioniert (Liste weiter unten) führe ich auf den noch nicht erfolgten Abgleich des CAN Bussystems des neuen Comand und des Wagens zurück. Ich wollte mal fragen, ob mir jemand das bestätigen kann, damit ich für meinen Besuch bei MB vorbereitet bin.
1) KI-Anzeige der Comandfunktionen und die Uhrzeit fehlen
2) Lenkradtastenfunktion fehlt.
3) Beleuchtung des Comand fehlt
4) automatische Ein/Ausschaltung des Comand mit Zündung Ein/Aus klappt nicht
Ich vermute die Funktionen 1-4 werden über CAN-Bus zwischen dem Comand und dem KI freigegeben
5) das Navi berechnet Ziele mit Zeit, km, Routenliste etc. zeigt auch die Streckenführung in blau, aber nur wenn der Wagen länger geparkt war. Der dann erkennbare Standort ist aber nicht sehr exakt, ich schätze so 50-100m falsch. Sobald man aber wegfährt folgt das Navi nicht mehr angezeigten Strecke, und sagt dann "off Road". Die CONFIGURATION (siehe Bild) zeigt auch noch den Hex-Code "Radimpuls =30" (analoges Speedsignal). Dieser Wert müsste 0 sein, da das Speedsignal mir Hilfe eines Umsetzers digitalisiert wurde und über CAN kommuniziert werden sollte. Da aber das neue (2.0) und das bestehende (2.5) CAN Protokoll noch nicht aufeinander abgestimmt ist, vermute ich, dass daher dieser Fehler entsteht. Kann dies jemand bestätigen und kann die Stardiagnose dieses digitalisierte Speedsignal im CAN-Bus hinterlegen, bzw. auch die Punkte 1-4 aktivieren.

Beste Antwort im Thema
Das meinte ich mit dem Thema GPS Antenne.. die Antenne vom 2.5 ist meines Wissens nach anders als die vom 2.0 und (könnt mich schlagen...) entweder das 2.5 oder das 2.0 hat noch nen Filter in der Antennenleitung verbaut... kann mich nicht mehr erinnern ob das nur bei den US/JAPs so war aber ich meine das da noch was im Leitungsweg war...
Gruß...
88 Antworten
So, nachdem mein 2.5-er immer und dauerhaft Datum und Uhrzeit verloren hat, habe ich den Umbau auf 2.0 gewagt. Elektrisch und mechanisch ist es fertig und sieht gut aus. D2B Bus läuft ohne Probleme, somit auch Telefon, CD-Wechsler und BOSE.
Was noch nicht funktioniert (Liste weiter unten) führe ich auf den noch nicht erfolgten Abgleich des CAN Bussystems des neuen Comand und des Wagens zurück. Ich wollte mal fragen, ob mir jemand das bestätigen kann, damit ich für meinen Besuch bei MB vorbereitet bin.
1) KI-Anzeige der Comandfunktionen und die Uhrzeit fehlen
2) Lenkradtastenfunktion fehlt.
3) Beleuchtung des Comand fehlt
4) automatische Ein/Ausschaltung des Comand mit Zündung Ein/Aus klappt nicht
Ich vermute die Funktionen 1-4 werden über CAN-Bus zwischen dem Comand und dem KI freigegeben
5) das Navi berechnet Ziele mit Zeit, km, Routenliste etc. zeigt auch die Streckenführung in blau, aber nur wenn der Wagen länger geparkt war. Der dann erkennbare Standort ist aber nicht sehr exakt, ich schätze so 50-100m falsch. Sobald man aber wegfährt folgt das Navi nicht mehr angezeigten Strecke, und sagt dann "off Road". Die CONFIGURATION (siehe Bild) zeigt auch noch den Hex-Code "Radimpuls =30" (analoges Speedsignal). Dieser Wert müsste 0 sein, da das Speedsignal mir Hilfe eines Umsetzers digitalisiert wurde und über CAN kommuniziert werden sollte. Da aber das neue (2.0) und das bestehende (2.5) CAN Protokoll noch nicht aufeinander abgestimmt ist, vermute ich, dass daher dieser Fehler entsteht. Kann dies jemand bestätigen und kann die Stardiagnose dieses digitalisierte Speedsignal im CAN-Bus hinterlegen, bzw. auch die Punkte 1-4 aktivieren.
------
Der Antennenumbau von 2.5 auf 2.0 bezieht sich nur auf den Anschluss, von SMB-Stecker (2.5) auf HRS (2.0). Hierfür habe ich von einer FAKRA-Verlöngerung (8cm) das Gehäuse entfernt = SMB und am anderen Ende eine HRS-Buchse angelötet.
--------
So wieder ein Stück weiter. Die Kiste mag mich doch. Nach etwas umverdrahten am CAN Bus geht jetzt alles nach Plan, bis auf das Navi. Es spricht, und berechnet Routen, zeigt auch die Routenliste und Fahrzeit weiß aber nicht wo der Wagen wirklich ist. Er errechnet sich offensichtlich in langen Berechnungen einen Standort der um die 100m falsch ist und meldet off Road beim fahren.
Ich habe noch keine Lösung, Wie man dem Navirechner das digitale Speedsignal vermitteln kann. Auf dem Bild sollte die der "Radimpuls" auf "0" stehen?? Aber wie kommt man dahin?
----------------
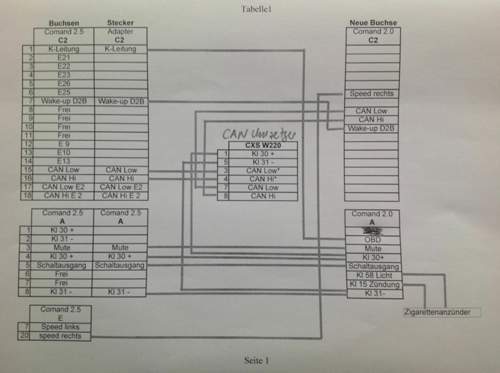
Reifenparameter kann ich im Comand einstellen. Aber wie gesagt das Navi weiß nur ungefähr wo es sich befindet und kann der errechneten und dargestellten Streckenführung nicht folgen und meldet off Road. Ich habe ein Speedsignal vom Wagen auf Klemme 6 des neuen Comand 2.0 gelegt, so wie vorgesehen. Habe am Montag einen Termin bei MB mal schauen, ob ich bis dahin weiter bin, oder ob die was finden. Ich hänge mal den Verdrahtungsplan an. Vielleicht kann ja jemand was sehen, wo der mögliche Fehler liegt??
-----------------
Übrigens den Plan habe ich nochmal angepasst. Der oben ist falsch, so startet das Navi nicht mal. Das braucht ein Speedsignal auf A1. Wegen der Antennen habe ich was gefunden, aber nur in den USA Foren, da gibt es wohl etwas und wahrscheinlich den NSA (:-)) einzubinden. Ich bekomme aber, je nach Standort 4-8 Satelliten. Wenn die Antenne nicht passen sollte würden die doch dem Navi nicht sichtbar sein, oder? Im Moment sieht alles gut aus mit dieser Schaltung. Muss aber erstmal fahren. Ein großes Problem habe ich behoben. Durch die Adapterstecker, mit den Minihülsen und dem mehrfachen aus/Einbau habe ich einige Wackelkontakte bekommen. Habe jetzt doch alles festverbunden. Haltet mir die Daumen..
Anbei der aktuelle Plan
--------------------
So das Wunder ist geschehen. ES LÄUFT, MIT DER PLANVERDRAHTUNG!!!!! Warum???? K.A. Ohne Stardiagnose oder sonst was komplexes an Diagnoseverfahren. Vermute tatsächlich die "Wackler" waren die Ursache. Im Moment ist das Navi noch etwas schneller als der Wagen, aber ich denke, da gibt es vielleicht einen Lerneffekt? Es merkt auch wenn es über's Ziel hinausgeschossen ist, und korrigiert umgehend. Bin aber erst 2-3 km gefahren.
---------------------
Was ist das eigentlich für ein CAN-Umsetzer im Plan? Das ist ein Teil den ein Kfz Meister in Schwanstetten vertreibt. Aber den gibt es auch von einer portugiesischen Firma im Netz. Ohne das Ding gibt es keine Verbindung zwischen Comand und KI. Der sitzt den CAN Bus des 2.5 um, damit das 2.0 in lesen kann. Aber mehr weiß ich nicht dazu. Es gibt andere Mercedes BR und wohl auch die letzen vormopf Modelle aus 2001+, die brauchen das nicht.
--------------------
Das 2.5 besteht aus eigentlich zwei Teilen. Einem Navi-Teil (1-DIN) und einem Teil wo Bildschirm, Audio, CD-Laufwerk und Casettenlaufwerk drin ist. Um das zusammen zu binden gibt es einen Daten-Stecker E, der diese Verbindungen zwischen, eigentlich 2 Teilen herstellt. In diesem Stecker (26-polig) sind auch die Speedsignale abgelegt und davon wird eines auf C2.6 und A1 gelegt.
----------------
So nach Reifenkalibrierung und 120km Fahrt ist das Navi auch auf Spur und die Position stimmt.

hast du das auch mit SD angelernt?
Hi... Sofern du mittels SD auf das neue Comand Zugriff hast musst du selbiges initialisieren. Wenn du es mit SD nicht siehst musst du erst mittels Vediamo das KI, das MRM und falls vorhanden das ZGW anpassen. Sollte bei dir kein ZGW vorhanden sein musst du das Zündschlossmodul anpassen da hier dann der CAN - MUX sitzt...
Hast du die GPS-Antenne auch getauscht? Meines Wissens nach hat das 2.0er ne andere Antenne als das 2.5..
Wenn das dann alles in eine Sackgasse führt gibt's noch die Möglichkeit mittels Analyzer den CAN abzuhorchen. Wenn man dann die beiden Comands dann abgehört hat kann man sich eine Übersetzungstabelle erstellen und mittels eines kleinen 8 Bit Microcontroller quasi einen CAN Übersetzer bauen. Das ist aber ein Riesen Spaß und kann einen schnell zur Weißglut bringen...
(Wir haben das mal gebraucht für nen Motorsport-Umbau... da waren 3 Mann 2 Monate beschäftigt bis die CAN Übrsetzung lief...)
Der größte Haken dürfte aber sein, daß bei der BR215 noch nicht so viel mit Vediamo machbar war und DAS nur ein paar Optionen hat welche meist nicht ganz passen...
Wie ich schon mal anmerkte ist die gesamte Telematik nicht grad einfach aufgebaut und wenn es blöd läuft kann es sein daß du einige weitere "Gehirne" also Steuergeräte umbauen musst.
Schau am besten mal bei 1-2-3 meins nach der Einführungsschrift neue Telematik BR220/215 da sind einige nützliche Infos drin...
Ansonsten viel Glück und Hut ab vor jemanden der so nen Umbau wagt ??
Gruß...
Vielen Dank @Monaco86
Am SD war das Teil noch nicht. Aber es hat schon einmal ohne großen Aufstand in einem W220 Vormopf funktioniert. Ich habe übrigens einen W220 aus 4/2000, keinen W215. Der Antennenumbau von 2.5 auf 2.0 bezieht sich nur auf den Anschluss, von SMB-Stecker (2.5) auf HRS (2.0). Hierfür habe ich von einer FAKRA-Verlöngerung (8cm) das Gehäuse entfernt = SMB und am anderen Ende eine HRS-Buchse angelötet.
Kannst du mir bitte die Abkürzungen ausschreiben?
MRM =
ZGM =
CAN-MUX =
Ähnliche Themen
MRM Mantelrohrmodul
ZGW Zentrales Gateway
CAN-Mux Multiplexer
Zum Thema Antenne: ich meine die hatten auch unterschiedliche Dämpfungswerte...
Der Widerstand ist in beiden Fällen 50 Ohm.
Zitat:
Ansonsten viel Glück und Hut ab vor jemanden der so nen Umbau wagt ??
Wie schon oft gesagt, selber gemacht, keinerlei Probleme. Und ich war da nicht der einzige damals. Die hier beschriebenen Probleme gabs aber auch nicht, war allerdings ein MJ2001.
Weiss aber von einem MJ2000 der das ebenfalls ohne Probleme gemacht hat. Kuriose Sache das. 🙁
So wieder ein Stück weiter. Die Kiste mag mich doch. Nach etwas umverdrahten am CAN Bus geht jetzt alles nach Plan, bis auf das Navi. Es spricht, und berechnet Routen, zeigt auch die Routenliste und Fahrzeit weiß aber nicht wo der Wagen wirklich ist. Er errechnet sich offensichtlich in langen Berechnungen einen Standort der um die 100m falsch ist und meldet off Road beim fahren.
Ich habe noch keine Lösung, Wie man dem Navirechner das digitale Speedsignal vermitteln kann. Auf dem Bild sollte die der "Radimpuls" auf "0" stehen?? Aber wie kommt man dahin?

Zitat:
@Bamberger_1 schrieb am 4. September 2017 um 13:21:00 Uhr:
So wieder ein Stück weiter. Die Kiste mag mich doch. Nach etwas umverdrahten am CAN Bus geht jetzt alles nach Plan, bis auf das Navi. Es spricht, und berechnet Routen, zeigt auch die Routenliste und Fahrzeit weiß aber nicht wo der Wagen wirklich ist. Er errechnet sich offensichtlich in langen Berechnungen einen Standort der um die 100m falsch ist und meldet off Road beim fahren.
Ich habe noch keine Lösung, Wie man dem Navirechner das digitale Speedsignal vermitteln kann. Auf dem Bild sollte die der "Radimpuls" auf "0" stehen?? Aber wie kommt man dahin?
Hallo Bambi.
Für mich wäre die erste Frage ob die Wegstreckeninformation überhaupt am Comand ankommt.
->Kann mit DAS bei der Fahrt ausgelesen werden.
->Die Reifenparameter werden ebenfalls über DAS codiert.
Grüße, Frank
Hallo Frank, Reifenparameter kann ich im Comand einstellen. Aber wie gesagt das Navi weiß nur ungefähr wo es sich befindet und kann der errechneten und dargestellten Streckenführung nicht folgen und meldet off Road. Ich habe ein Speedsignal vom Wagen auf Klemme 6 des neuen Comand 2.0 gelegt, so wie vorgesehen. Habe am Montag einen Termin bei MB mal schauen, ob ich bis dahin weiter bin, oder ob die was finden. Ich hänge mal den Verdrahtungsplan an. Vielleicht kann ja jemand was sehen, wo der mögliche Fehler liegt??
Wenn bei der Berechnung ohne Fahrt der Standort schon falsch ist dann fehlt das GPS Signal. Wenn das GPS funktioniert dann brauchst du die wegstecke nur für Tunnel und eine höhere Genauigkeit. Ohne Wegsignal sollte das Navi auch gehen.
Das meinte ich mit dem Thema GPS Antenne.. die Antenne vom 2.5 ist meines Wissens nach anders als die vom 2.0 und (könnt mich schlagen...) entweder das 2.5 oder das 2.0 hat noch nen Filter in der Antennenleitung verbaut... kann mich nicht mehr erinnern ob das nur bei den US/JAPs so war aber ich meine das da noch was im Leitungsweg war...
Gruß...
Übrigens den Plan habe ich nochmal angepasst. Der oben ist falsch, so startet das Navi nicht mal. Das braucht ein Speedsignal auf A1. Wegen der Antennen habe ich was gefunden, aber nur in den USA Foren, da gibt es wohl etwas und wahrscheinlich den NSA (:-)) einzubinden. Ich bekomme aber, je nach Standort 4-8 Satelliten. Wenn die Antenne nicht passen sollte würden die doch dem Navi nicht sichtbar sein, oder? Im Moment sieht alles gut aus mit dieser Schaltung. Muss aber erstmal fahren. Ein großes Problem habe ich behoben. Durch die Adapterstecker, mit den Minihülsen und dem mehrfachen aus/Einbau habe ich einige Wackelkontakte bekommen. Habe jetzt doch alles festverbunden. Haltet mir die Daumen..
Anbei der aktuelle Plan

MB kann dir nicht weiterhelfen, such dir jemanden mir einer Freien SD.
MB Diagnose greift auf den Server in Berlin und der hat nur dein Soll Daten.
Manuelles ändern geht da nicht.