Der CAN-Bus im Volvo
Um Kabelbäume unter anderem in Fahrzeugen zu vereinfachen entwickelte Bosch im Jahre 1983 das Controller Area Network. Seit dem Jahr 2000 findet dieses System in vielen Fahrzeugen Anwendung (bei Volvo ab V70II S80 S60 XC70 XC90).
Grundprinzip ist, dass der gesamte Datenaustausch auf zwei Leitungen stattfindet. Diese werden um Reflexionen an beiden Enden zu vermeiden jeweils mit einem 120 Ohm Widerstand terminiert. Die Signalübertragung erfolgt differenziell mit einer Spannungsdifferenz von 2V zwischen CAN-H und CAN-L. Da im KFZ die Datenleitung vielen Störfeldern ausgesetzt ist werden beide Kabel miteinander verdrillt ,damit beide Leitungen den Störungen gleichermaßen ausgesetzt sind und eine Spannungsdifferenz von 2V erhalten bleibt.
Link zur Grafik
Bei einem dominanten Zustand (logisch 0) liegen beide Leitung auf einer Spannung von 2,5 volt. Im rezessiven Zustand (logisch 1) wird die Spannung der Leitung CAN-H(igh) um 1V auf 3,5V angehoben und die Spannung auf der Leitung CAN-L(ow) um 1V auf 1,5V abgesenkt.
Link zur Grafik
Alle im Netzwerk befindlichen Geräte können auf dieser Leitung mithören und abwechselnd senden. Damit sichergestellt wird, dass immer nur ein einzelnes Gerät sendet ist das Übertragungsverfahren streng definiert. Eine Darstellung aller Mechanismen würden den Inhalt des Forums jedoch sprengen, somit ist es an dieser Stelle sinnvoll die wesentlichen Spezifikationen zu erläutern.
Ein Gerät muss immer auf eine Lücke warten, bis es anfangen darf, Daten in das Netzwerk zu senden. Gleichzeitig muss das sendende Gerät im Netzwerk mithören und vergleichen ob jeder einzelne Spannungszustand erfolgreich in das Netzwerk übertragen wird. Da bei einer 1 der Pegel als hoch und einer 0 der Pegel als tief definiert ist, kommt es dazu, dass wenn zwei Geräte gleichzeitig senden, das Gerät mit dem dominanten Bit das Netzwerk auf Null zieht und somit den rezessiven Zustand überschreibt. Weil jedes Gerät die zu sendende Meldung mit dem Zustand des Netzwerkes vergleicht, stellt das Gerät, welches zum eigentlichen Zeitpunkt eine 1 gesendet hat einen Fehler fest und stoppt die eigene Sendung. Infolgedessen haben Meldungen mit einer vorausgehenden 0 eine höhere Priorität als Meldungen mit einer vorausgehenden 1.
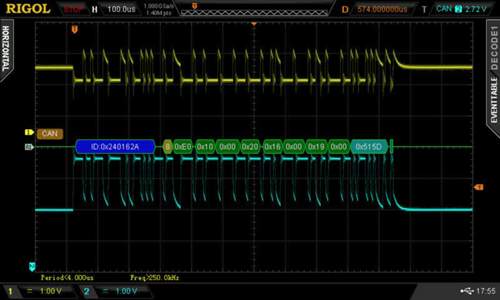
Zur Identifikation besteht jede gesendete Meldung aus einer ID und einem Datensatz.
Zum Beispiel die Meldung welche vom Lenkradmodul gesendet wird, um den Zustand des Blinker- und Wischerhebels wiederzugeben:
ID: 0111300A Daten: C0 00 00 27 80 8E 00 C0
Da Volvo den erweiterten J1939-CAN-Frame nutzt besteht die ID aus 4 Bytes “01 11 30 0A” welche einerseits die Priorität der Meldung festlegen und andererseits der Identifikation dienen. Jede ID in einem Netzwerk darf nur einmal vergeben sein. Die ID hat den Nutzen für andere Geräte, dass diese dadurch selektieren können, welche Informationen für sie wichtig sein können. Das Radio beispielsweise achtet auf IDs, welche vom CEM kommen und die Geschwindigkeit und Beleuchtungseinstellung enthalten, wie auch auf IDs welche vom Lenkradmodul kommen und eine Änderung der Lenkradtasten enthalten.
Ein Gerät darf auch über mehrere IDs verfügen, da es auch verschiedene Informationen versenden kann.
Die ID bei Volvo wird gefolgt von einem 8 Byte Datensatz “C0 00 00 27 80 8E 00 C0” in diesem sind die Informationen enthalten, welche das Gerät dem Netzwerk mitteilt.
In Beispiel des Lenkradmoduls codiert die 5te Stelle (Byte 4) für:
5te Stelle:
80: Nichts gedrückt
84: Blinkhebel in rechter Stellung
88: Blinkhebel in linker Stellung
C0: Resettaste am Blinkhebel wird betätigt (Boardcomputerversion)
A0: Read Taste am Blinkhebel wird betätigt
Die 6te Stelle "8E" gibt an, dass der Wischerhebel in 0 Stellung ist.
Die Gesamte Meldung wird etwa alle 15ms in das Datennetzwerk gesendet (nach Priorität häufiger oder seltener), damit jegliche Geräte über den Zustand Bescheid wissen und entsprechend reagieren können. Erhält das CCM die Meldung 84 aktiviert es das Relais für den Blinker der rechten Seite.
Link zum Datendiagramm
Im Datendiagramm ist zu erkennen, dass die gesamte Meldung (als Frame bezeichnet) aus mehr als der ID und dem Datensatz besteht. Es sind noch einige Zusätze nötig, damit eine Meldung erfolgreich übertragen werden kann, diese sind aber bei alleiniger Betrachtung der Meldungen hier nicht von Bedeutung und werden in der realen Anwendung von Controllern automatisch errechnet und durchgeführt.
Kommt es trotz aller Mechanismen dazu, dass ein Fehler auftritt, weil beispielsweise eine ID doppelt im Netzwerk auftritt, unterbricht das Gerät mit gleicher ID die Sendung sofortig und versucht zu einem weiteren Zeitpunkt seine Meldung in das Netzwerk zu senden. Kommt es weiterhin hintereinander zum selbigen Fehler, klinkt sich das Gerät für eine vergleichsweise längere Zeit (ca. 10s) aus dem Netzwerk aus und versucht den Datentransfer erneut. Dies kann jedoch gravierend sein, wenn beispielsweise für etwa 10s der Blinker nicht mehr funktioniert.
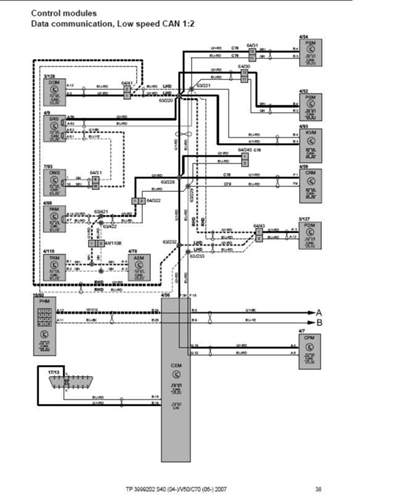
Im Volvo gibt es zwei verschiedene CAN-Netzwerke:
Link zur Grafik
Das Motor High-Speed CAN mit einer Datenrate von 250kb/s und das Comfort-Low-Speed-CAN mit einer Datenrate von 125kb/s. Beide Netzwerke laufen voneinander unabhängig, das CEM ist das einzige Gerät welches in Kontakt mit beiden Netzwerken steht und somit Daten zwischen diesen austauschen kann wie beispielsweise die Drehzahl.
Volvo hat die Codierung jeglicher Daten in jedem Baujahr geändert, was zur Folge hat, das sich Geräte aus unterschiedlichen Baujahren nicht über den CAN-Bus unterhalten können, das sie ihre Meldungen nicht mehr verstehen.
Dazu ein Beispiel für die Datenwörter, welche unter anderem für die Tasten des Lenkrades zuständig sind:
Fahrzeug aus 2001
ID: 00200066 Daten: C0 00 00 01 1F 40 40 7F
Fahrzeug aus 2002:
ID: 0261300A Daten: 80 00 00 27 80 C2 00 CF
Beide Meldungen erfüllen genau die gleiche Funktion, können aber nicht von Geräten aus anderen Baujahren interpretiert werden.
Durch diese Zusammenhänge lassen sich nicht nur Funktionen im Fahrzeug ergründen sondern auch Erweiterungen wie die eines CAN-Extenders aufbauen. Durch ein einfaches Senden einer Meldung in dieses Netzwerk lässt sich somit etwa eine Coming-Home Funktion mit zusätzlich aktivierten Nebelscheinwerfen realisieren oder es können Tastendrücke oder Fahrzeugdaten jeglicher Art erfasst werden.
Beste Antwort im Thema
Um Kabelbäume unter anderem in Fahrzeugen zu vereinfachen entwickelte Bosch im Jahre 1983 das Controller Area Network. Seit dem Jahr 2000 findet dieses System in vielen Fahrzeugen Anwendung (bei Volvo ab V70II S80 S60 XC70 XC90).
Grundprinzip ist, dass der gesamte Datenaustausch auf zwei Leitungen stattfindet. Diese werden um Reflexionen an beiden Enden zu vermeiden jeweils mit einem 120 Ohm Widerstand terminiert. Die Signalübertragung erfolgt differenziell mit einer Spannungsdifferenz von 2V zwischen CAN-H und CAN-L. Da im KFZ die Datenleitung vielen Störfeldern ausgesetzt ist werden beide Kabel miteinander verdrillt ,damit beide Leitungen den Störungen gleichermaßen ausgesetzt sind und eine Spannungsdifferenz von 2V erhalten bleibt.
Link zur Grafik
Bei einem dominanten Zustand (logisch 0) liegen beide Leitung auf einer Spannung von 2,5 volt. Im rezessiven Zustand (logisch 1) wird die Spannung der Leitung CAN-H(igh) um 1V auf 3,5V angehoben und die Spannung auf der Leitung CAN-L(ow) um 1V auf 1,5V abgesenkt.
Link zur Grafik
Alle im Netzwerk befindlichen Geräte können auf dieser Leitung mithören und abwechselnd senden. Damit sichergestellt wird, dass immer nur ein einzelnes Gerät sendet ist das Übertragungsverfahren streng definiert. Eine Darstellung aller Mechanismen würden den Inhalt des Forums jedoch sprengen, somit ist es an dieser Stelle sinnvoll die wesentlichen Spezifikationen zu erläutern.
Ein Gerät muss immer auf eine Lücke warten, bis es anfangen darf, Daten in das Netzwerk zu senden. Gleichzeitig muss das sendende Gerät im Netzwerk mithören und vergleichen ob jeder einzelne Spannungszustand erfolgreich in das Netzwerk übertragen wird. Da bei einer 1 der Pegel als hoch und einer 0 der Pegel als tief definiert ist, kommt es dazu, dass wenn zwei Geräte gleichzeitig senden, das Gerät mit dem dominanten Bit das Netzwerk auf Null zieht und somit den rezessiven Zustand überschreibt. Weil jedes Gerät die zu sendende Meldung mit dem Zustand des Netzwerkes vergleicht, stellt das Gerät, welches zum eigentlichen Zeitpunkt eine 1 gesendet hat einen Fehler fest und stoppt die eigene Sendung. Infolgedessen haben Meldungen mit einer vorausgehenden 0 eine höhere Priorität als Meldungen mit einer vorausgehenden 1.
Zur Identifikation besteht jede gesendete Meldung aus einer ID und einem Datensatz.
Zum Beispiel die Meldung welche vom Lenkradmodul gesendet wird, um den Zustand des Blinker- und Wischerhebels wiederzugeben:
ID: 0111300A Daten: C0 00 00 27 80 8E 00 C0
Da Volvo den erweiterten J1939-CAN-Frame nutzt besteht die ID aus 4 Bytes “01 11 30 0A” welche einerseits die Priorität der Meldung festlegen und andererseits der Identifikation dienen. Jede ID in einem Netzwerk darf nur einmal vergeben sein. Die ID hat den Nutzen für andere Geräte, dass diese dadurch selektieren können, welche Informationen für sie wichtig sein können. Das Radio beispielsweise achtet auf IDs, welche vom CEM kommen und die Geschwindigkeit und Beleuchtungseinstellung enthalten, wie auch auf IDs welche vom Lenkradmodul kommen und eine Änderung der Lenkradtasten enthalten.
Ein Gerät darf auch über mehrere IDs verfügen, da es auch verschiedene Informationen versenden kann.
Die ID bei Volvo wird gefolgt von einem 8 Byte Datensatz “C0 00 00 27 80 8E 00 C0” in diesem sind die Informationen enthalten, welche das Gerät dem Netzwerk mitteilt.
In Beispiel des Lenkradmoduls codiert die 5te Stelle (Byte 4) für:
5te Stelle:
80: Nichts gedrückt
84: Blinkhebel in rechter Stellung
88: Blinkhebel in linker Stellung
C0: Resettaste am Blinkhebel wird betätigt (Boardcomputerversion)
A0: Read Taste am Blinkhebel wird betätigt
Die 6te Stelle "8E" gibt an, dass der Wischerhebel in 0 Stellung ist.
Die Gesamte Meldung wird etwa alle 15ms in das Datennetzwerk gesendet (nach Priorität häufiger oder seltener), damit jegliche Geräte über den Zustand Bescheid wissen und entsprechend reagieren können. Erhält das CCM die Meldung 84 aktiviert es das Relais für den Blinker der rechten Seite.
Link zum Datendiagramm
Im Datendiagramm ist zu erkennen, dass die gesamte Meldung (als Frame bezeichnet) aus mehr als der ID und dem Datensatz besteht. Es sind noch einige Zusätze nötig, damit eine Meldung erfolgreich übertragen werden kann, diese sind aber bei alleiniger Betrachtung der Meldungen hier nicht von Bedeutung und werden in der realen Anwendung von Controllern automatisch errechnet und durchgeführt.
Kommt es trotz aller Mechanismen dazu, dass ein Fehler auftritt, weil beispielsweise eine ID doppelt im Netzwerk auftritt, unterbricht das Gerät mit gleicher ID die Sendung sofortig und versucht zu einem weiteren Zeitpunkt seine Meldung in das Netzwerk zu senden. Kommt es weiterhin hintereinander zum selbigen Fehler, klinkt sich das Gerät für eine vergleichsweise längere Zeit (ca. 10s) aus dem Netzwerk aus und versucht den Datentransfer erneut. Dies kann jedoch gravierend sein, wenn beispielsweise für etwa 10s der Blinker nicht mehr funktioniert.
Im Volvo gibt es zwei verschiedene CAN-Netzwerke:
Link zur Grafik
Das Motor High-Speed CAN mit einer Datenrate von 250kb/s und das Comfort-Low-Speed-CAN mit einer Datenrate von 125kb/s. Beide Netzwerke laufen voneinander unabhängig, das CEM ist das einzige Gerät welches in Kontakt mit beiden Netzwerken steht und somit Daten zwischen diesen austauschen kann wie beispielsweise die Drehzahl.
Volvo hat die Codierung jeglicher Daten in jedem Baujahr geändert, was zur Folge hat, das sich Geräte aus unterschiedlichen Baujahren nicht über den CAN-Bus unterhalten können, das sie ihre Meldungen nicht mehr verstehen.
Dazu ein Beispiel für die Datenwörter, welche unter anderem für die Tasten des Lenkrades zuständig sind:
Fahrzeug aus 2001
ID: 00200066 Daten: C0 00 00 01 1F 40 40 7F
Fahrzeug aus 2002:
ID: 0261300A Daten: 80 00 00 27 80 C2 00 CF
Beide Meldungen erfüllen genau die gleiche Funktion, können aber nicht von Geräten aus anderen Baujahren interpretiert werden.
Durch diese Zusammenhänge lassen sich nicht nur Funktionen im Fahrzeug ergründen sondern auch Erweiterungen wie die eines CAN-Extenders aufbauen. Durch ein einfaches Senden einer Meldung in dieses Netzwerk lässt sich somit etwa eine Coming-Home Funktion mit zusätzlich aktivierten Nebelscheinwerfen realisieren oder es können Tastendrücke oder Fahrzeugdaten jeglicher Art erfasst werden.
277 Antworten
Vielleicht H und L vertauscht?
Auf dem Bus gibts nur was zu sehen wenn der Schlüssel auf eine andere Position als 0 ist.
Oder man den Bus z.B. durch öffnen von Türen wach hält.
Die LED auf dem shield sind nur softwaremäßig implementiert.
In meiner Software werden diese nicht angesteuert, für mich unnötig und es soll ja auch Strom gespart werden.
Der Arduino baut eine serielle Verbindung zum Can Hacker auf. Das shield hat damit nichts zu tun.
Empfängt das shield eine Message, reicht es diese über SPi an den Arduino weiter und dieser sendet die Message über den Serialport weiter an Can Hacker...
Der Shield soll ja die selbe belegung haben wie der CFE (Alt, verleich 327) also SUB-D einfach rauf aber er will nicht... ... HM mein Ossi zuhause hat nach 15 jahren in meinem besitz das zeitliche gesegnet... ... werde mal in der Fa. mich rauf klemmen... ... wie gesagt der Punkt am Volvo (AEM) geht, wie gesagt das CFE ist drann und Lebt... PWR ist auf dem Shield an! Auf dem Uno ON = GrÜn, TX und RX blinken wenn ich aus dem CANHacker sende. Also auch leben bis dahin drin...
Okay, Belegung scheidet dann schonmal aus, es sei denn diese wurde am 327 verändert. Zwischen H und L sollte es nach Erinnerung 2,5V bis 5V Spannung geben, so sieht man ob es der CAN Bus ist.
CanHacker sollte auf speed 125 stehen, je nach dem in welchem Modus man sich befindet, wird nur was angezeigt, wenn man auch rec drückt und Filter sollte man auch deaktiviert haben...
Ist das kein Sparkfun oder echter Arduino ? Sonst vielleicht wirklich ein Hardwareproblem...
Habe mal ne LED mit Vorwiederstand an CAN H und L gehalten... ... und wenn ich sende kommt was... ... (LED ist an) hm... ... werde morgen noch mal schauen ob da was geht... ... (am Auto). Könnt ihr eigendlich etwas sehen wenn das Shield alleine ist, ich meine die eigenden gesendeten befele??? Ist nur mal so eine Frage... ...
Um den Stecker auszuschliessen... werde ich morgen auf die lötaugen gehen und selber an den SUB-D anpassen damit einfach nur der CFE ab muss und dann UNO mit Rucksack rauf... ...
Danke für eure Hilfe... ... mal sehen was draus wird... ... und ich hoffe ich kann dann auch eine Liste plotten die anderen Hilft.... ...
Ähnliche Themen
Hallo Gemeinde,
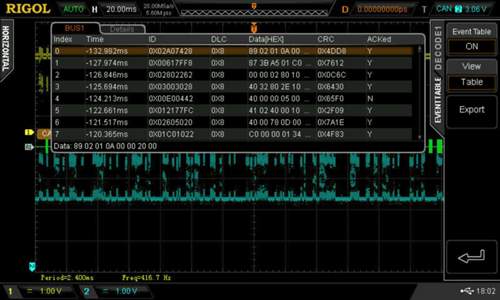
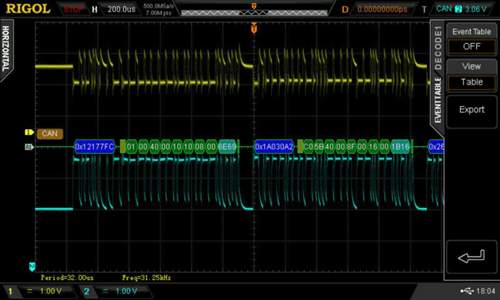
Heute habe ich es mal geschafft mich an meinen S60 zu begeben. Die CAN-Bus-Signale habe ich am REM abgegriffen. SardineCAN mit CANHacker wollte aber noch nichts anzeigen.
Aber mein Oszi kann ja auch CAN-Bus dekodieren, also fix ins Büro hoch und das Teil rangeholt.
Die Schirmbilder findet ihr als Fotos angehängt.
Ein Teil der Eventliste habe ich hier für euch:
Patient: Ein Volvo S60, 2.4l, 140PS, MY2003
CAN
Time,ID,DLC,Data,CRC,ACKed,
-1.3663400E-01,01C01022,8,80 00 00 01 34 90 12 4E,6201,Y,
-1.3549800E-01,00617FF8,8,4F BF E5 11 C0 80 C0 00,0CA3,Y,
-1.3436200E-01,012177FC,8,01 02 40 00 10 51 38 00,6A11,Y,
-1.3321800E-01,02605020,8,00 00 7C 9D F3 00 00 00,56A2,Y,
-1.2973000E-01,01E0522E,8,00 00 20 00 A4 92 00 00,7A4E,Y,
-1.2628200E-01,02C14DF4,8,83 AB 43 AA FC 0F D8 1D,725B,Y,
-1.2138600E-01,00617FF8,8,89 3F E5 11 C0 80 C0 00,231D,Y,
-1.2025800E-01,00404066,8,C0 00 00 07 1F 40 40 7F,17F9,Y,
-1.1911400E-01,0200600A,8,C0 00 00 00 00 1E 40 00,4A5A,Y,
-1.1797000E-01,0221300A,8,00 00 00 27 80 80 00 C0,4345,Y,
-1.1683400E-01,0240162A,8,C0 10 00 20 16 00 59 00,1B99,Y,
-1.1571300E-01,01A030A2,8,40 5B 40 00 8F 00 16 00,0EB9,Y,
-1.0622500E-01,00617FF8,8,C7 3F E5 11 C0 80 C0 00,1642,Y,
-1.0184000E-01,02802262,8,00 00 03 80 18 00 40 00,2019,Y,
-1.0068000E-01,02A07428,8,49 0E 01 08 00 FD 20 00,08B3,Y,
-9.9568001E-02,03200400,8,D4 65 20 00 00 00 00 00,11AA,Y,
-9.8424001E-02,03400400,8,00 00 01 08 00 00 00 00,292D,Y,
-9.6631001E-02,01C01022,8,C0 00 00 01 34 90 12 4E,0A1A,Y,
-9.5511001E-02,012177FC,8,41 02 40 00 10 11 B8 00,3DBE,Y,
-9.4368001E-02,01E0522E,8,41 00 20 00 A4 92 00 00,4565,Y,
-9.3239001E-02,00E00442,8,40 00 00 45 00 00 00 00,627B,Y,
-9.2094001E-02,02605020,8,40 00 78 1D F3 00 00 00,491F,,
-9.0862001E-02,00617FF8,8,0F 3F E5 11 C0 80 C0 00,4F20,N,
-8.5477001E-02,0221300A,8,40 00 00 27 80 80 00 C0,2B5E,Y,
-8.4349001E-02,0240162A,8,00 10 00 20 16 00 19 00,7A28,Y,
-8.0325501E-02,0200600A,8,00 00 00 00 00 1E 40 00,37EE,Y,
-7.6813001E-02,01A030A2,8,80 5B 40 00 8F 00 16 00,730D,Y,
-7.5708001E-02,00617FF8,8,49 BF E5 11 C0 80 C0 00,7531,Y,
-7.4588001E-02,02C14DF4,8,C3 AB 43 2A FC 0F D8 1D,1556,Y,
-7.3491001E-02,03003028,8,00 32 00 2E 04 00 28 00,4A8D,Y,
-6.1835001E-02,02802262,8,40 00 03 80 18 00 40 00,4802,Y,
-6.0691001E-02,00617FF8,8,8F 3F E5 11 C0 80 C0 00,5A8F,Y,
-5.9571001E-02,01E0522E,8,81 00 20 00 A4 92 00 00,38D1,Y,
-5.8443001E-02,03E0002A,8,05 0F 00 1F 17 00 00 38,2348,Y,
-5.6538001E-02,01C01022,8,00 00 00 01 34 90 12 4E,77AE,Y,
-5.5410001E-02,012177FC,8,81 02 40 00 10 51 38 00,7FBE,Y,
-5.4257001E-02,02605020,8,80 00 7C 9D F3 00 00 00,430D,Y,
-5.3121001E-02,03805428,8,86 00 20 C9 9E 4E 00 00,00E8,Y,
-5.0458001E-02,00404066,8,00 00 00 00 1F 40 40 7F,137E,Y,
-4.9297001E-02,0221300A,8,80 00 00 27 80 80 00 C0,56EA,Y,
-4.8161001E-02,0240162A,8,40 10 00 20 16 00 19 00,1233,Y,
-4.6457001E-02,00617FF8,8,C7 3F E5 11 C0 80 C0 00,1642,Y,
-4.5329001E-02,02A07428,8,89 0E 05 0A 00 FD 20 00,07FE,Y,
-4.4209001E-02,00E00442,8,80 00 00 15 10 00 00 00,2EBE,Y,
-4.3055001E-02,0360424C,8,81 00 E0 01 03 F5 09 00,6CED,Y,
-4.0352001E-02,0200600A,8,40 00 00 00 00 1E 40 00,5FF5,Y,
-3.6807001E-02,01A030A2,8,C0 5B 40 00 8F 00 16 00,1B16,Y,
-3.1534001E-02,00617FF8,8,0F 3F E5 11 C0 80 C0 00,4F20,N,
-2.6366001E-02,02C14DF4,8,03 AB 43 AA FC 0F D8 1D,67F4,Y,
-2.4806001E-02,01E0522E,8,C0 00 20 00 A4 92 00 00,07FA,Y,
-2.1838001E-02,02802262,8,80 00 03 80 18 00 40 00,35B6,Y,
-1.6621501E-02,01C01022,8,40 00 00 01 34 90 12 4E,1FB5,Y,
-1.5493001E-02,00617FF8,8,4F BF E5 11 C0 80 C0 00,0CA3,Y,
-1.4357001E-02,012177FC,8,C1 02 40 00 10 11 B8 00,2811,Y,
-1.3213001E-02,0221300A,8,C0 00 00 27 80 80 00 C0,3EF1,Y,
-1.2077001E-02,0240162A,8,80 10 00 28 16 00 59 00,5AA6,Y,
-1.0957001E-02,02605020,8,C0 00 78 1D F3 00 00 00,5CB0,Y,
-1.0290009E-03,00617FF8,8,87 3F E5 11 C0 80 C0 00,7E59,Y,
9.8999050E-05,0200600A,8,80 00 00 00 00 1E 40 00,2241,Y,
1.2589990E-03,03003028,8,40 33 80 2E 04 00 A8 00,3519,Y,
2.3869990E-03,03200400,8,E4 65 20 00 00 00 00 00,0EC7,Y,
3.5309990E-03,01A030A2,8,00 5B 40 00 8F 00 16 00,66A2,Y,
4.6439990E-03,03400400,8,00 00 02 08 00 00 00 00,0B59,Y,
5.8209990E-03,00E00442,8,C0 00 00 45 00 00 00 00,77D4,Y,
8.6689990E-03,02A07428,8,C9 0E 01 08 00 FD 20 00,1D1C,Y,
1.0219999E-02,01E0522E,8,01 00 20 00 A4 92 00 00,2D7E,Y,
1.3588999E-02,00617FF8,8,CF 3F E5 11 C0 80 C0 00,3294,Y,
1.8164999E-02,02802262,8,C0 00 03 80 18 00 40 00,5DAD,Y,
1.9988999E-02,0240162A,8,C0 10 00 20 16 00 19 00,079C,Y,
2.1108999E-02,00404066,8,40 00 00 01 1F 40 40 7F,1C8D,Y,
2.2244999E-02,0221300A,8,00 00 00 27 80 80 00 C0,4345,Y,
2.3381999E-02,01C01022,8,80 00 00 01 34 90 12 4E,6201,Y,
2.4517999E-02,012177FC,8,01 02 40 00 10 11 B8 00,55A5,Y,
2.5662999E-02,02605020,8,00 00 78 1D F3 00 00 00,2104,Y,
2.6830999E-02,02C14DF4,8,43 AB 43 2A FC 0F D8 1D,00F9,Y,
2.8534999E-02,00617FF8,8,0F 3F E5 11 C0 80 C0 00,4F20,N,
3.9404999E-02,0200600A,8,C0 00 00 00 00 1E 40 00,4A5A,Y,
4.3197999E-02,01A030A2,8,40 5B 40 00 8F 00 16 00,0EB9,Y,
4.4309999E-02,00617FF8,8,47 BF E5 11 C0 80 C0 00,2875,Y,
4.5437999E-02,01E0522E,8,41 00 20 00 A4 92 00 00,4565,Y,
4.6565999E-02,03A05008,8,D1 60 FF FF FF FF FF FF,20E6,Y,
5.5045999E-02,0240162A,8,00 10 00 20 16 00 19 00,7A28,Y,
5.6165999E-02,00E00442,8,00 00 00 15 10 00 00 00,3B11,Y,
5.7318999E-02,0221300A,8,40 00 00 27 80 80 00 C0,2B5E,Y,
5.8446999E-02,02802262,8,00 00 03 80 18 00 40 00,2019,Y,
5.9606999E-02,00617FF8,8,8F 3F E5 11 C0 80 C0 00,5A8F,Y,
6.3471999E-02,01C01022,8,C0 00 00 01 34 90 12 4E,0A1A,Y,
6.4591999E-02,012177FC,8,41 02 40 00 10 51 38 00,020A,Y,
6.5743999E-02,02605020,8,40 00 7C 9D F3 00 00 00,3EB9,Y,
6.6895999E-02,02A07428,8,09 0E 05 0A 00 FD 20 00,1251,Y,
7.3535999E-02,00617FF8,8,C9 3F E5 11 C0 80 C0 00,4B06,Y,
7.4663999E-02,02C14DF4,8,83 AB 43 AA FC 0F D8 1D,725B,Y,
7.5768999E-02,03003028,8,80 32 80 2E 04 00 28 00,06D6,Y,
7.8248999E-02,03C00002,8,C0 00 00 04 06 02 42 D9,1429,Y,
7.9608999E-02,0200600A,8,00 00 00 00 00 1E 40 00,37EE,Y,
8.0776999E-02,01E0522E,8,82 00 20 00 A4 92 00 00,0418,Y,
8.3193999E-02,01A030A2,8,80 5B 40 00 8F 00 16 00,730D,Y,
8.8769999E-02,00617FF8,8,0F BF E5 11 C0 80 C0 00,64B8,Y,
9.0041999E-02,0240162A,8,40 10 00 20 16 00 59 00,0E36,Y,
9.1162499E-02,00404066,8,80 00 00 02 1F 40 40 7F,0C98,Y,
9.2297999E-02,0221300A,8,80 00 00 27 80 80 00 C0,56EA,Y,
9.4234999E-02,03200400,8,F4 65 20 00 00 00 00 00,476B,Y,
9.5378999E-02,03400400,8,00 00 03 08 00 00 00 00,1575,Y,
9.8170999E-02,02802262,8,40 00 03 80 18 00 40 00,4802,Y,
1.0338000E-01,01C01022,8,00 00 00 01 34 90 12 4E,77AE,Y,
1.0450800E-01,00617FF8,8,47 3F E5 11 C0 80 C0 00,03ED,Y,
1.0564400E-01,012177FC,8,81 02 40 00 10 11 B8 00,400A,Y,
1.0679600E-01,00E00442,8,40 00 00 45 00 00 00 00,627B,Y,
1.0794100E-01,02605020,8,80 00 78 1D F3 00 00 00,34AB,Y,
1.1519700E-01,01E0522E,8,C1 00 20 00 A4 92 00 00,50CA,Y,
1.1866900E-01,00617FF8,8,89 3F E5 11 C0 80 C0 00,231D,Y,
1.1979750E-01,01017FFC,8,1C 01 04 01 01 01 03 01,56D3,Y,
1.2094900E-01,0200600A,8,40 00 00 00 00 1E 40 00,5FF5,Y,
1.2210200E-01,02A07428,8,49 0E 01 08 00 FD 20 00,08B3,Y,
1.2321400E-01,0360424C,8,C0 00 F0 00 0B F5 09 00,6F85,Y,
1.2434200E-01,01A030A2,8,C0 5B 40 00 8F 00 16 00,1B16,Y,
1.2545500E-01,0240162A,8,80 10 00 20 16 00 19 00,6F87,Y,
1.2659100E-01,0221300A,8,C0 00 00 27 80 80 00 C0,3EF1,Y,
1.2772700E-01,02C14DF4,8,C3 AB 43 2A FC 0F D8 1D,1556,Y,
1.3338300E-01,00617FF8,8,CF 3F E5 11 C0 80 C0 00,3294,Y,
1.3816700E-01,02802262,8,80 00 07 80 18 00 40 00,4D06,Y,
Hauptsächlich Coming-Home und ZV auf/zu.
Wie eingangs geschrieben verweigert SardineCAN noch die Zusammenarbeit. Ich vermute fast das mein Problem mit der Lawicel-Unterstützung zusammenhängt. Da werd ich nochmal "beigehen" müssen, wie man hier sagt. 🙂
Wäre nett wenn mir jemand bestätigen könnte das die Signale so ok sind und ich nicht kompletten Blödsinn dekodiert habe.
gruß, Holger
Hallo Gemeinde,
ich sitze hier gerade und schaue mir die Kombination CANHacker v2 <= USB => Arduino/Sparkfun CAN-Shield an.
Habe die beiden CAN-Leitungen mit nem Widerstand terminiert und das Oszi kann die eigenen gesendeten Meldungen auch dekodieren (Ohne Terminierung tut das nicht, logisch. Ob man mit 60 oder mit 120Ohm terminiert ist auch egal, hauptsache da hängt ein Widerstand zwischen). Nun müsste ich doch eigentlich auch ein Echo meiner eigenen Aussendungen mitlesen können?
gruß, Holger
Wenn das CAN Shield direkt am Oszi mit einem Abschlusswiderstand von 60 Ohm dazwischen angeschlossen ist (ohne Anschluß am REM), dann muß etwas am Oszi während des Sendens sichtbar sein. Dann sieht man auch gleich, ob die richtige Baudrate eingestellt ist.
Falls nichts zu sehen ist, dann liegt es an den Einstellungen oder der Hardware.
Zitat:
@waver08 schrieb am 6. März 2015 um 14:57:42 Uhr:
... dann muß etwas am Oszi während des Sendens sichtbar sein. ...
Das tut es, meine Frage zielte eher in Richtung CANHacker. Also ob man dort seine eigenen Messages sehen sollte.
Unser Forist DR_V70 hat mich auf die richtige Spur gebracht. Die aktuelle Software 0.4 von "hackingvolvo" ist buggy. Der Einsatz der v0.3 brachte den Erfolg!
Das als Hinweis an alle die sich, wie ich auch, mit der 0.4er gepflegt die Karten gelegt haben!
Die Blinker beim S60 MY 2003 werden, z.B. über die ID 0A1030A2 angesteuert. Wenn ich morgen mal Muße hab versuch ich mir nen Gutmann-Tester für ne Stunde zu schnorren und probier mal ein paar Stellglieddiagnosen.
gruß, Holger
Hallo CAN-Hacker's, 😁
Ich bräuchte mal eure Fachmännische hilfe 😰
ich hab mich heute mal an meinem V70II (BJ:2001) versucht, leider ohne erfolg.
Hab das REM ausgebaut und an die Grün und Weiß verdrillten Adern, Ader angequetscht.
(mit diesen Verteiler quetsch kleimmen dingens, wo man das über eine Ader rüberdrückt die andere da neben steckt und dann so ein metall runterdrückt.)
Dann hab ich meinen SainSmart UNO und das SeeedStudio-CAN-BUS-Shield zusammen gesteckt, und an die 2 Schraubklemmen vom Canbus-Shield meinen Abgegriffenen CAN aufgelegt. Ist das Richtig oder muss ich wirklich an den D-Sub?
Wenn ich an den Klemmen mit einem Multimeter gegen Masse messe, hab ich 2,xxVolt auf beiden Klemmen. Ist das Richtig?
dann hab ich alles Software mäßig so wie in diesem Thread beschrieben gemacht, wurde auch immer problemlos auf den UNO aufgespielt.
ABER mit CANHACKER kann ich nichts sehen 🙁
Wenn ich bei CANHACKER einen Singleshot (Links Blinken ID: 000FFFFE Datensatz: CE 48 B0 05 01 03 02 00) auslösen blinkt es am UNO aber mehr passiert nicht 🙁
Can ist auf 125kbits eingestellt.
In welcher Position muss der kleine Schalter auf dem CANbus-Shield stehen (on oder off) ?
Bitte helft mir, ich komm nicht so recht weiter 🙁
Liegt es an der Hardware?, weil es kein Original Arduino ist? und nicht das Sparkfun-Shield?
gruß vahn13
Sollte damit auch funktionieren weil im Grunde ja die gleiche Hardware verbaut ist und auch die gleichen Anschlüsse für die Kommunikation von Arduino und Shield verwendet werden.
Ca. 2.5V in bei Bus-Ruhe ist schonmal gut. Kommen die aber auch am Shield an? Ich bin kein Freund von Stromdieben als Klemmen zumal am REM 2 Pins vom CAN-Bus mit wenig Aufwand erreichbar sind (und das ganze auch ohne Spuren rückbaubar!).
Wenn Du am Fahrzeug irgendeine Aktion machst (Tür auf, ZV betätigt, Licht an, etc.) senden die Steuergeräte ihre Mitteilungen auf dem Bus. Dann sollte die RX-LED an deinem Shield flackern, versuchst Du selbst Nachrichten zu senden sollten RX und TX kurz flackern.
Seed-Studio hat aber auch nen Wiki, da ist nen kurzer Sketch mit dem man CAN-Bus Nachrichten via Terminalemulation auslesen kann. Probier das doch mal. Mit einer Geschwindigkeit von 125kB/s solltest Du etwas lesen können.
http://www.seeedstudio.com/wiki/CAN-BUS_Shield
Wie bereits geschrieben ist die v0.4 Buggy, bei mir tat nur die v0.3 die mir freundlicheweise DR_V70 hat zukommen lassen.
gruß, Holger
Greif CAN-High und -LOW direkt am D-Sub-Stecker ab, da gabs bei mir keine Probleme. M/F-Jumper Kabel passen mit dem female-Ende genau über die Steckkontakte und das male-Ende könnte dann zB. direkt in die OBDII-Schnittstelle gesteckt werden. Eigentlich ziemlich praktisch 😉
Im verlinkten Wiki von Seeed Studio siehst du ja, dass es sich um die Pins 3 und 5 handelt.
Der Schalter steht bei meinem Shield auf "on".
Erstmal danke für die Antworten 🙂
ja ganz glücklich ist in der Situation ein "Stromdieb" vielleicht nicht, aber die 2,xx Volt hab ich an den Schraubklemmen gemessen, also am Shield sollte der CAN Anliegen, darum wundert es mich auch das die RX/TX nicht leuchten ...
ich hab mir jetzt das gegnstück für den D-SUB geholt und an die Pins
wie hier http://www.seeedstudio.com/wiki/CAN-BUS_Shield angelötet
auch da kein lesen/senden möglich :/
@stadtgurerilla
Leider blinken die RX TX Led's in beiden fällen (Schraubklemmen oder D-SUB) nicht 🙁
Könntest du mir die version 0.3 zu kommen lassen?
@ 0xC90
An die OBD wollte ich wenn möglich nicht dran, da ich hinten mehr Platz habe um die Geschichte leicht
zugänglich zu halten, und trotzdem gut verstecken kann .. wär aber ein versuch wert 🙂
zu dem Schalter: funktioniert es denn auch wenn er auf off steht?
Ist es für das Shield ZWINGEND erforderlich die 12V und Masse anzulegen??
weil spannung hol ich ja "erstmal" über den Laptop per USB
Hallo Alle Can Bus Freunde,
endlich habe ich mich dazu aufgerafft, dieses Interface hier anzuschaffen:
http://www.wgsoft.de/de/shop/can-bus-systeme.html
Der erste Kontakt mit einem Volvo V50 verlief absolut positiv: mit ner 500kBit konnte ich über die OBD Buchse am HighSpeed Can mithören. Allerdings waren die ID dermassen viel, dass ich überhaupt keinen blassen Schimmer habe wie ich jetzt auf das "Radio" zugreifen kann. Ziel ist es, einen USB Eingang zu programmieren und den Bordcomputer im Display zu aktivieren. Die Schaltpläne sind vorhanden, VIDA ebenfalls. Nur diese ganze CAN Bus programmiererei ist Neu. Wie könnte mein erster Schritt aussehen um die IAM/ ICM Frequenz zu finden?!?
Ratlose Grüße
DAvid
Hallo hier. Ich hoffe die älteren Beiträge werden noch irgendwie am Leben gehalten.
Ich habe einen S60 Bj 2oo1 und möchte diesen um eine Komfort Blinkfunktion erweitern. Hätte mir da überlegt mit einem NE555 als Ausschaltverzögerung parallel zum Blinkerschalter ein zu bauen. Man müsste allerdings großen Aufwand mit div. Mikroschaltern betreiben da ja li, re schneller Wechsel von li,re mit Reset usw berücksichtigt werden müssten. Aus Platz gründen also nicht machbar doof. :-((
So müsste es doch möglich sein die Programmierung zu ändern? Auslesen - ändern - einspielen. ??
geht das irgendwie ?
l.G.